

Inertial measurement unit and geomagnetic sensor integrated calibration apparatus and calibration method
An inertial measurement unit and geomagnetic sensor technology, applied in the field of navigation, can solve the problems of low measurement accuracy, complex calibration methods, and high cost of calibration equipment, and achieve the effects of reducing costs, improving accuracy and reliability, and avoiding mechanical installation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
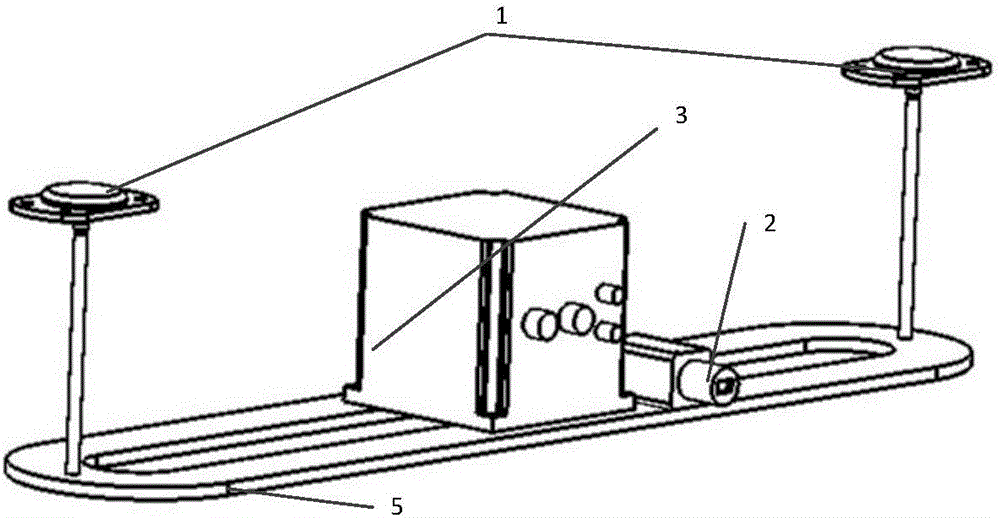
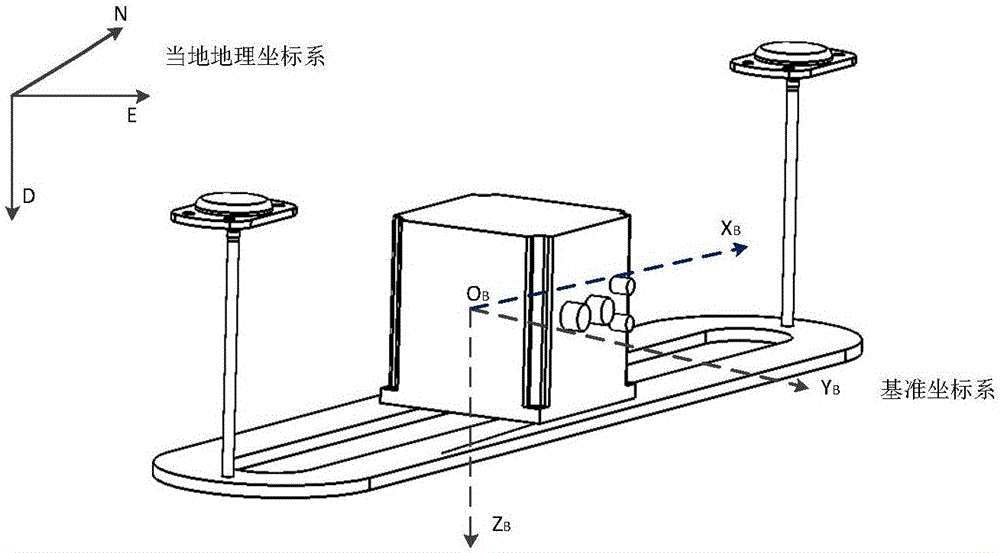
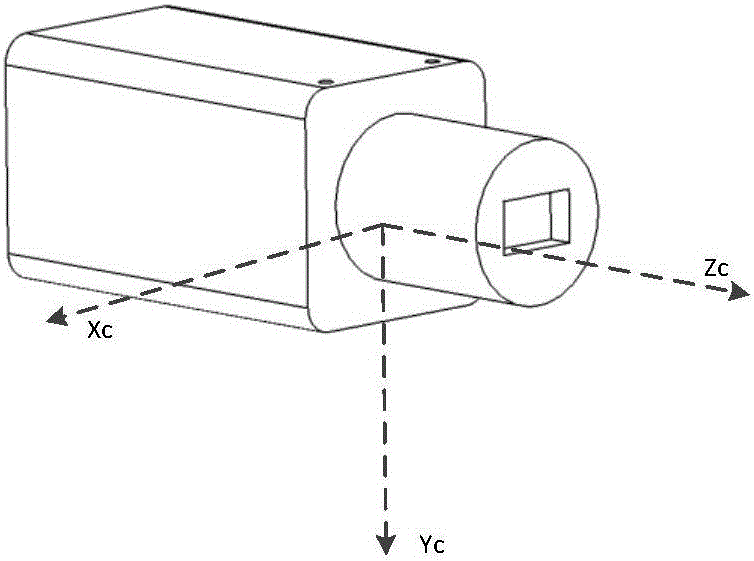
[0028] Specific implementation mode 1. Combination Figure 1 to Figure 6 To illustrate this embodiment, the inertial measurement unit and the overall calibration device of the geomagnetic sensor are combined figure 1This embodiment is described, including a set of dual-antenna GNSS / SINS high-precision integrated navigation system, a telephoto high-resolution industrial camera 2 and a calibration hexahedron tooling 4 . Each surface of the hexahedral tooling is coated with a high-precision two-dimensional square augmented reality cooperation target with different IDs. The high-precision integrated navigation system and the high-resolution industrial camera are fixed through the metal plate pole 5, and the baseline length between the antennas is guaranteed to be more than 1.5m to ensure that the noise of the reference heading angle is kept at a small level. The dual-antenna GNSS / SINS high-precision integrated navigation system is used as the benchmark test equipment for the tran...
specific Embodiment approach 2
[0039] Specific embodiment two, combine Figure 7 Describe this embodiment, this embodiment is the calibration method of the inertial measurement unit and the geomagnetic sensor overall calibration device described in the first specific embodiment, and its specific calibration process is as follows:
[0040] 1. Place the reference navigation system and the calibration hexahedron on the same horizontal plane. In order to ensure the measurement accuracy, minimize the distance between the camera and the hexahedron;
[0041] 2. Establish the calibration model of the sensor of the measured object,
[0042] The model of the accelerometer is
[0043]
[0044] in, is the specific force after calibration; is the specific force of the original output of the accelerometer; b a is the zero bias of the accelerometer, w a Indicates the accelerometer noise level; K a is the matrix of accelerometer scale factors and mounting coupling coefficients.
[0045] The calibration model of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More