

Six-axis industrial robot track accurate tracking-and-controlling oriented intelligent teaching system
An industrial robot, tracking control technology, applied in the field of robotics, to achieve the effect of reduced volume, high control precision and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
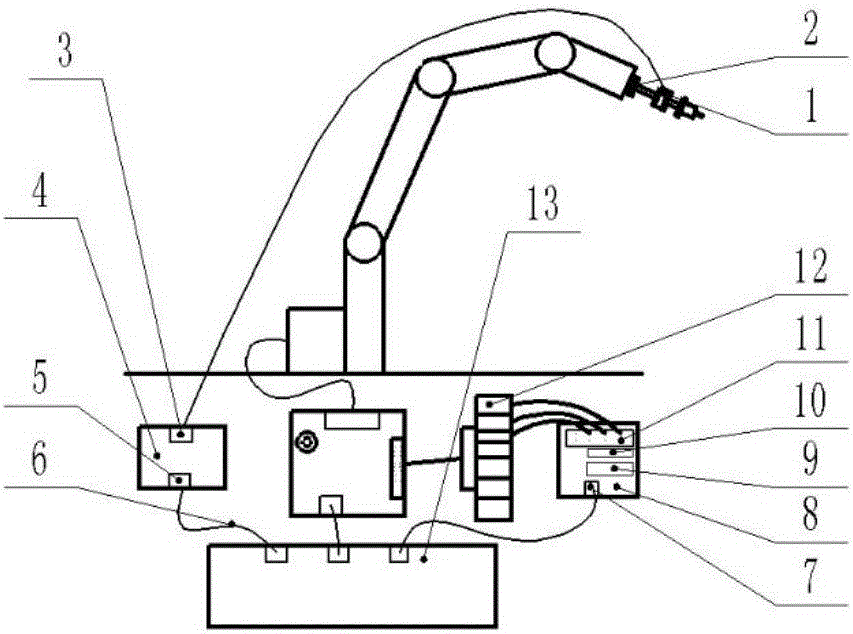
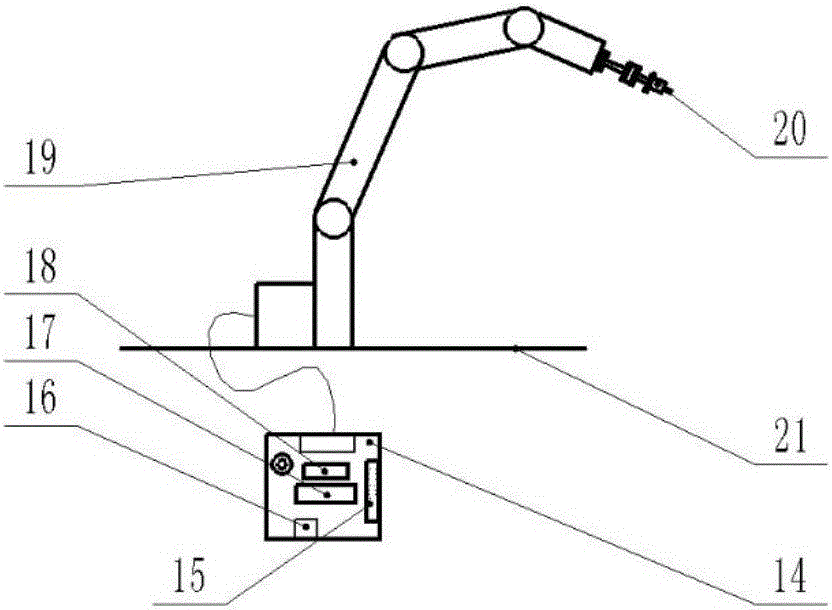
[0022] like Figure 1-4 As shown, firstly, the six-axis industrial robot controller (14) and the linux-based embedded control system Raspberry Pi (8) complete the parameter initialization, and the circular load unit (1) detects the force at the end of the robot, and then Send to the data storage box (4) through the force signal data input interface (3) for dynamic storage, and then connect the router (13) through the force signal data output interface (5) and Ethernet communication network cable (6), at the same time, the data The storage box (4) will be given an IP address.
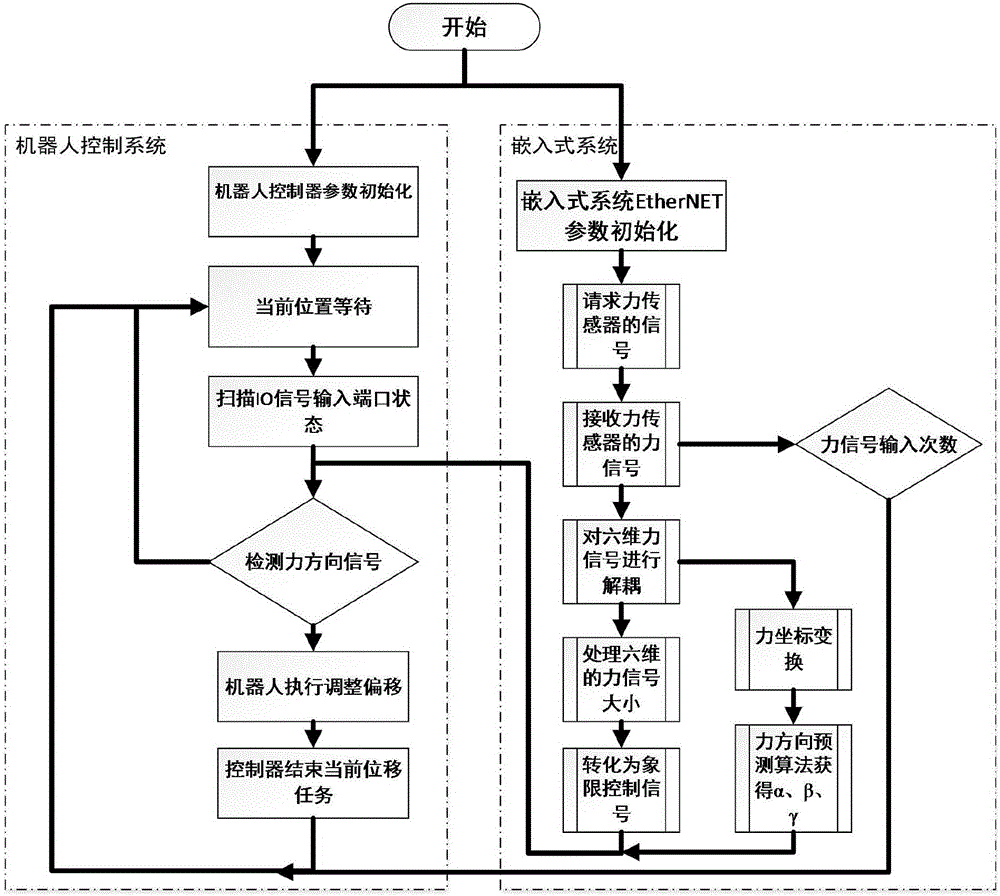
[0023]Secondly, the force signal enters the embedded control system raspberry pie (8) based on linux from the raspberry pie Ethernet input interface (7) after passing through the router (13) port. In the system raspberry pie, the force signal will go through six steps. The signal processing process of the force signal decoupling unit (9) and the force coordinate transformation processing unit (10) furth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More