

A Hierarchical Model Based UAV Target Tracking Method
A target tracking and layered model technology, applied in the field of remote sensing image processing, can solve problems affecting accuracy, increasing search time, and target motion offset between image frames, so as to improve accuracy, improve efficiency and accuracy, The effect of preventing target loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The specific implementation method of the present invention will be described in detail below in conjunction with the accompanying drawings.
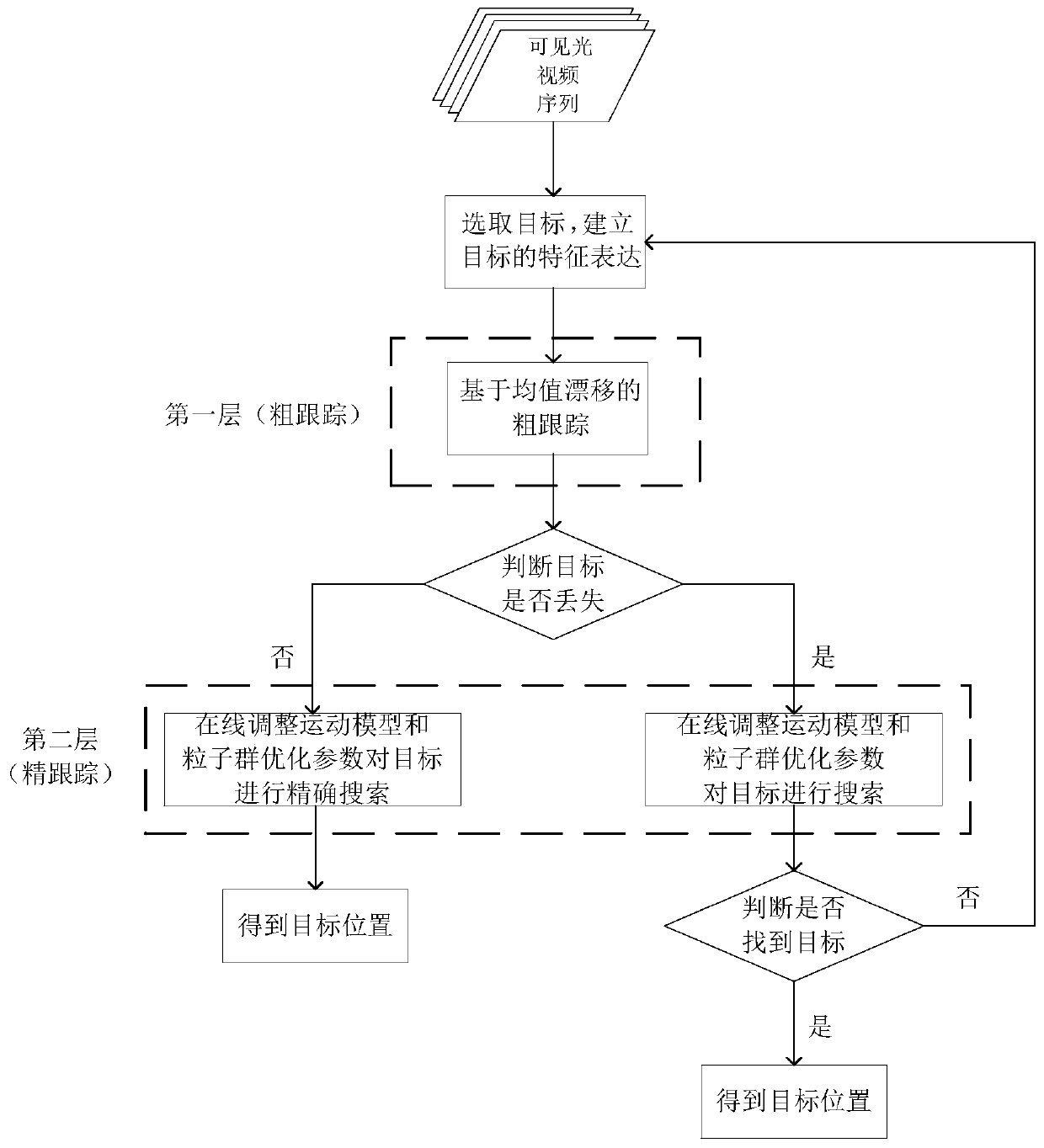
[0026] The invention is a layered model-based UAV target tracking method, by establishing the feature expression of the initial frame target, establishing a rough tracking model based on mean drift and establishing a fine tracking model based on improved particle swarm optimization and other steps to realize the tracking of UAV video targets. figure 1 The overall flow chart of the method is given, and the specific implementation method is as follows figure 2 shown, including the following steps:
[0027] The first step is to establish the feature representation of the initial frame target
[0028] This step first reads in the video sequence, manually selects the target area to be tracked, and establishes a normalized space color histogram model based on kernel function weighting for the selected target area, and uses the featu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More