

Indoor navigation positioning method, system, to-be-positioned device and anchor nodes
A positioning device and indoor navigation technology, applied in the field of indoor positioning systems with high navigation accuracy, can solve problems such as poor positioning accuracy and complex positioning method processes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
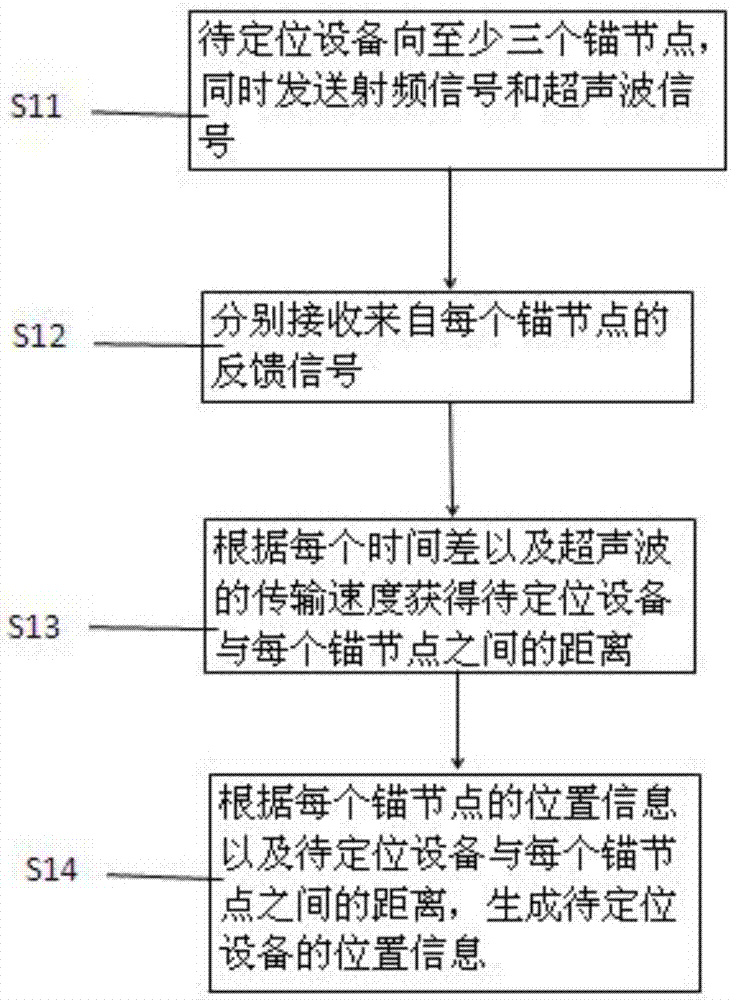
[0108] This embodiment relates to an indoor navigation and positioning method. The above-mentioned indoor navigation and positioning method has a schematic flow chart as shown in image 3 shown, including the following steps:
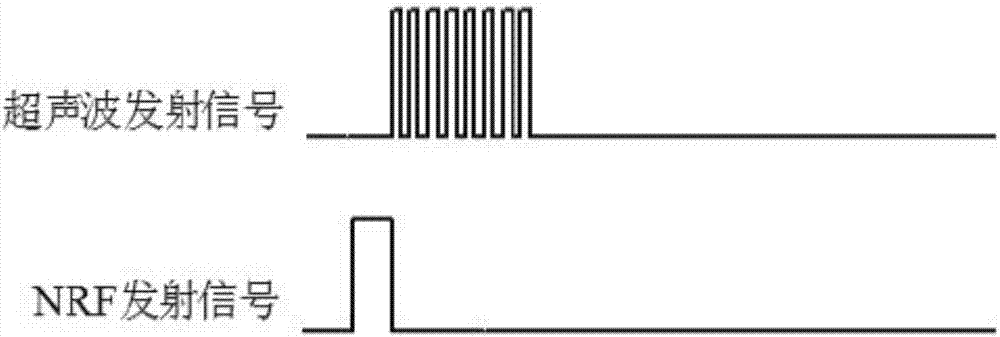
[0109] Step S11: The device to be positioned simultaneously sends radio frequency signals and ultrasonic signals to at least three anchor nodes, and the at least three anchor nodes are distributed in different directions relative to the device to be positioned.
[0110] Wherein, at least three anchor nodes, such as anchor node A, anchor node B, anchor node C and so on.
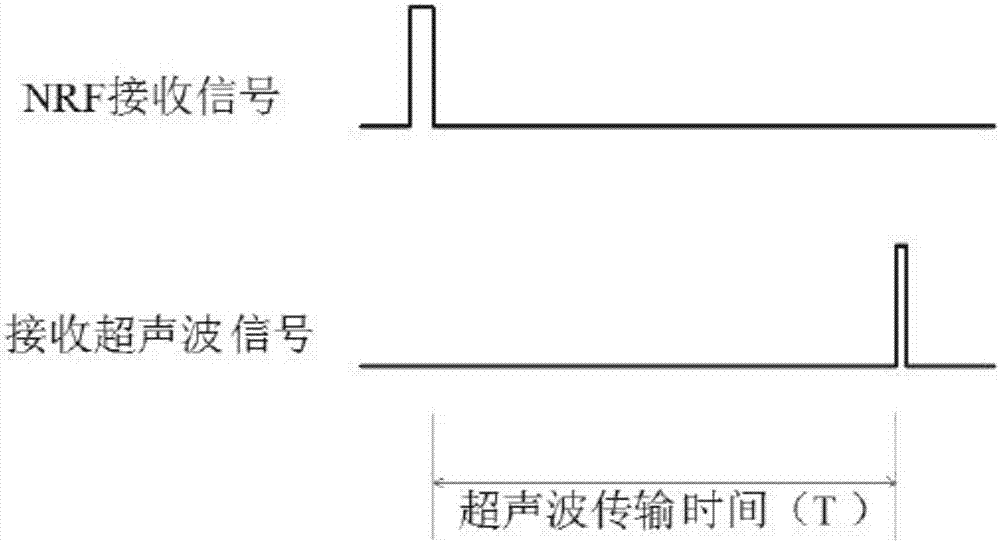
[0111] Step S12: Receiving a feedback signal from each anchor node respectively, the feedback signal being the time difference between the radio frequency signal and the ultrasonic signal received by the anchor node.
[0112] For example, the device to be positioned sends the radio frequency signal and the ultrasonic signal to the anchor node A at the same time, and the anchor node A f...
Embodiment 2
[0119] like Figure 4 As shown, on the basis of Embodiment 1, the indoor navigation and positioning method of this embodiment also includes setting a preset time t 0 . Proceed as follows:
[0120] Step S11: The device to be positioned simultaneously sends radio frequency signals and ultrasonic signals to at least three anchor nodes, and the at least three anchor nodes are distributed in different directions relative to the device to be positioned.
[0121] Wherein, at least three anchor nodes, such as anchor node A, anchor node B, anchor node C and so on.
[0122] Step S12: Receiving a feedback signal from each anchor node respectively, the feedback signal being the time difference between the radio frequency signal and the ultrasonic signal received by the anchor node.
[0123] For example, the device to be positioned sends the radio frequency signal and the ultrasonic signal to the anchor node A at the same time, and the anchor node A first at t 1 time RF signal is recei...
Embodiment 3
[0138] like Figure 5 As shown, on the basis of Embodiment 1, in the navigation and positioning method of this embodiment, each step is specifically as follows:
[0139] Step S11 in this embodiment is specifically: while the device to be positioned sends radio frequency signals to at least three anchor nodes, at least three ultrasonic signals are sequentially sent at least three times according to the preset ultrasonic delay time each time;
[0140] Step S12: Receive the feedback signal from each anchor node respectively, the feedback signal is the time difference between the radio frequency signal and the ultrasonic signal received by the anchor node;
[0141] For example, the device to be positioned sends the radio frequency signal and the ultrasonic signal to the anchor node A at the same time, and the anchor node A first at t 1 time RF signal is received, then at t 2 time to receive the ultrasonic signal, t 2 with t 1 The time difference between is the ultrasonic trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More