

Mixed switchover work space mapping method of master-slave isomerous teleoperation robot
A teleoperation robot and mapping method technology, which is applied in the field of workspace mapping of master-slave heterogeneous teleoperation robots, can solve the problems of position control accuracy, algorithm implementation complexity, instability, etc., to meet the requirements of precise positioning and calculation The effect of high efficiency and small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The feasibility and technical solutions in the implementation of the present invention will be clearly and completely described below in conjunction with specific embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, the embodiments obtained without creative work all belong to the protection scope of the present invention.
[0044] Embodiments of the present invention are as follows:
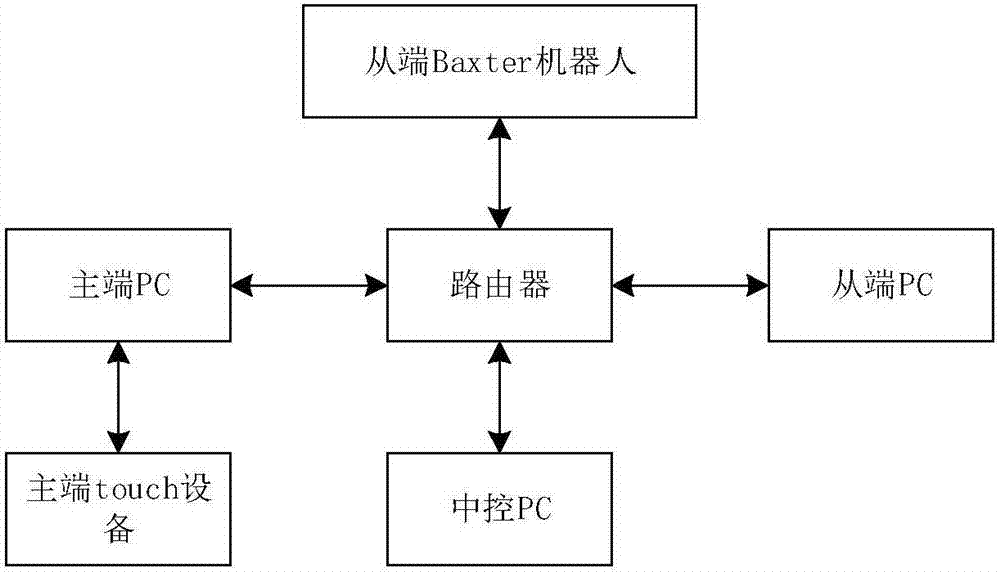
[0045] This embodiment adopts the built teleoperating system platform, the master device on the hardware uses Geomagic Touch force feedback device, the slave device selects the Baxter robot of Rethink Robotics Company, and the network connection adopts a local area network formed by routers. The software platform is based on the open source robot operating system ROS, and the algorithm is implemented using MATLAB software.
[0046] Such as figure 1 As shown, the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More