

A Hybrid Servo Control Loop for Inertial Platforms
An inertial platform and servo control technology, applied in the control field, can solve the problems of collision, unobservable, abnormal instrument output, etc., to simplify the system design, overcome the reaction torque that cannot be ignored, and achieve the effect of measurability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to make the purpose, technical solution and advantages of the present invention clearer, the following will further describe the public implementation manners of the present invention in detail with reference to the accompanying drawings.
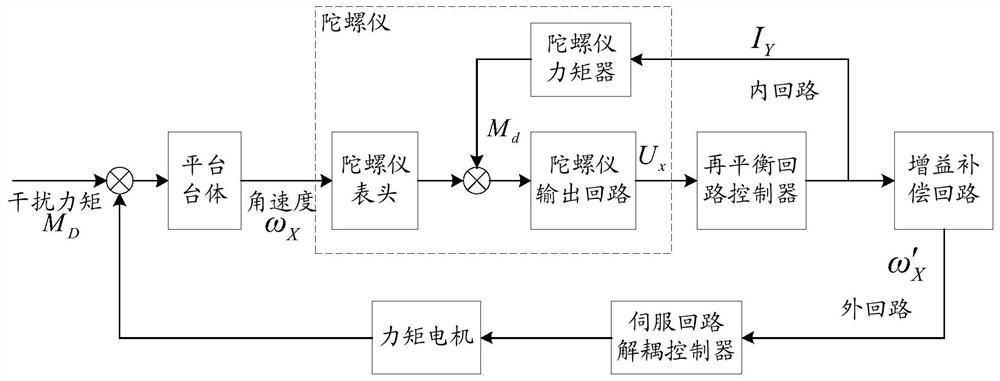
[0054] refer to image 3 , shows a block diagram of an inertial platform hybrid servo control loop in an embodiment of the present invention. In this embodiment, the inertial platform hybrid servo control loop includes: a gyroscope, a rebalance loop controller, a gain compensation loop, a servo loop decoupling controller, a platform body, and a torque motor.
[0055] In this embodiment, the platform body is used to output an angular velocity when the relative inertial space is subjected to a disturbance torque; the gyroscope is installed on the platform body to be sensitive to the angular velocity and output a voltage signal ; wherein, the voltage signal is proportional to the angular velocity; the rebalance loop controller...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More