

A detachable connection mechanism for the upper manipulator of an underwater robot
An underwater robot, disassembly and connection technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of large impact and increase the danger of gas cylinders, and achieve the effect of rapid separation and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
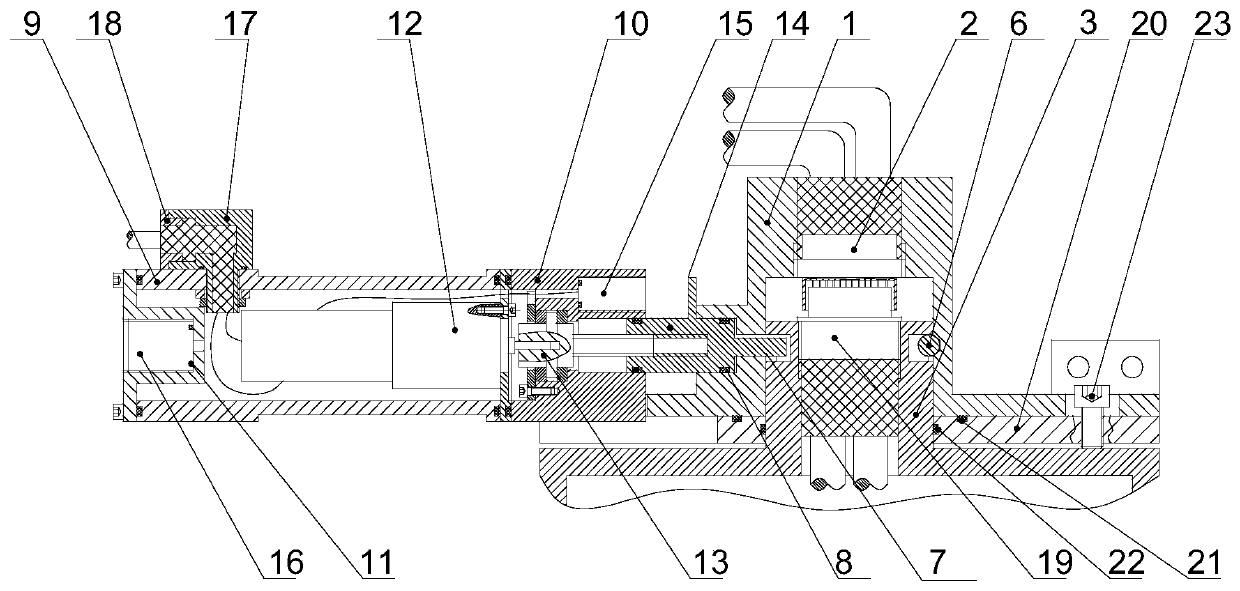
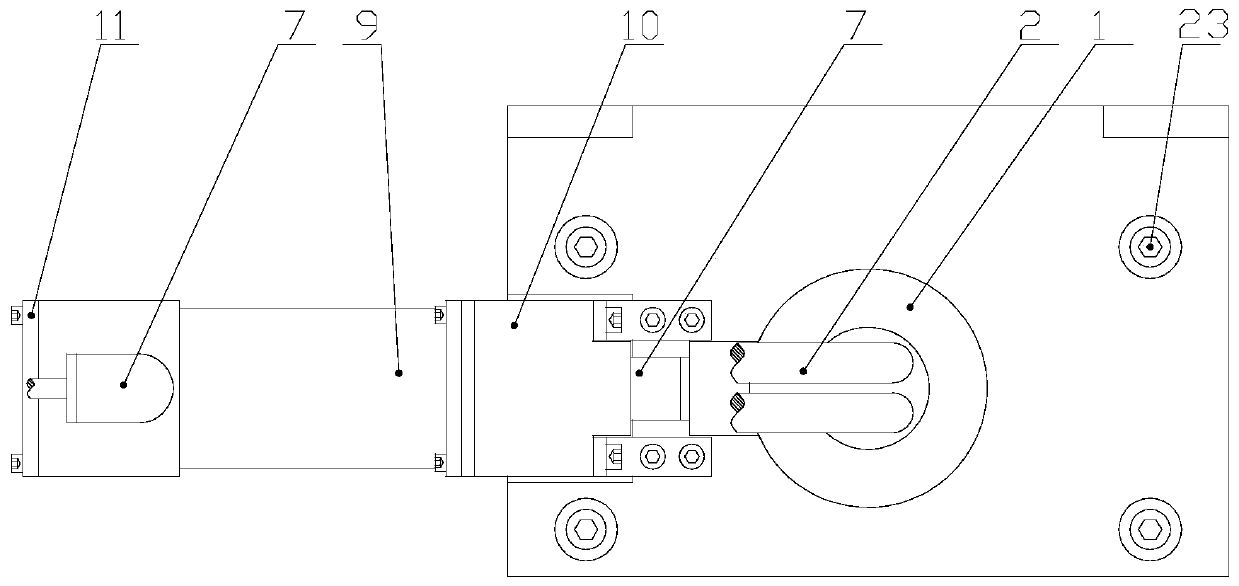
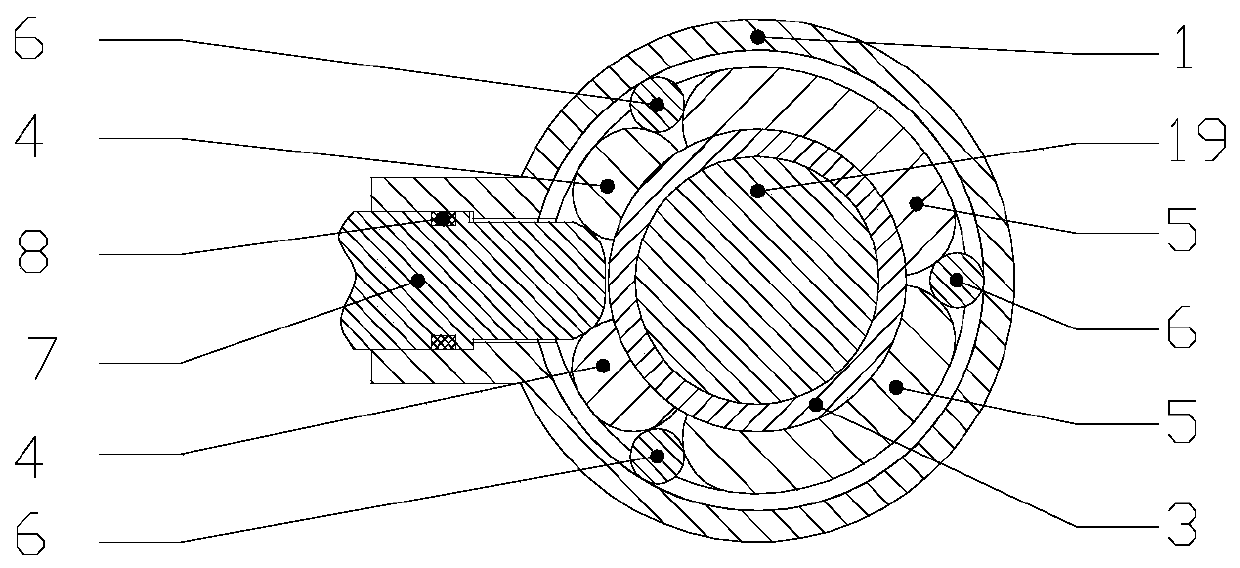
[0025] Such as Figure 1-6 As shown, a detachable connection mechanism for a manipulator on an underwater robot includes an installation sleeve seat 1 arranged on the underwater robot body, and a cable socket 2 is arranged in the installation sleeve seat 1, and the cable socket 2 is connected with the vulcanized rubber. A seal is installed between the socket seats 1, and a hollow manipulator connection seat 3 is movably embedded in the socket seat 1.
[0026] A mounting groove is provided on the outer periphery of the part of the manipulator connecting seat 3 that is passed through the mounting sleeve seat 1 . Two driving blocks 4 and two transmission blocks 5 are arranged in the installation groove, and steel plates are arranged between the drive block 4 and the transmission block 5 and between the two adjacent transmission blocks 5 in the i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More