Position and speed estimation method and device for PMLSM servo control system
A servo control system, speed estimation technology, applied in the direction of control system, vector control system, control electromechanical transmission device, etc., can solve the problems of inaccurate estimated value, resistance easily affected by temperature changes, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
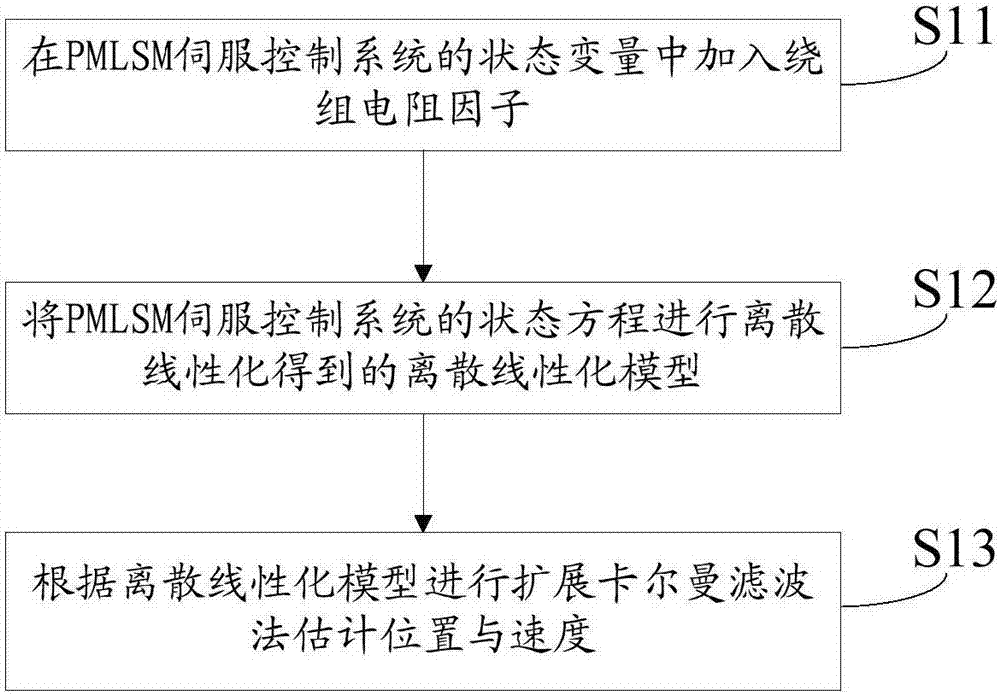
[0090] Embodiment 1 of the present invention provides a method for estimating position and speed of a PMLSM servo control system, figure 1 It is a schematic flow chart of a PMLSM servo control system position and speed estimation method of the present invention, comprising the following steps:
[0091] Step S11, adding the winding resistance factor to the state variable of the PMLSM servo control system.
[0092] Specifically, the above steps include: adding a resistance component x=[i α i β v x R] T ;
[0093] Obtain the state space model of the PMLSM servo control system as:
[0094]
[0095] Among them, ω(t) and σ(t) are the process noise and measurement noise included respectively, and the nonlinear matrix is:
[0096]
[0097] The input matrix B of the system is:
[0098] The output matrix H of the system is:
[0099] iα and i β is the phase current in the α-β coordinate system; u α and u β is the phase voltage in the α-β coordinate system; R is the ...
Embodiment 2
[0164] Embodiment 3 of the present invention provides a PMLSM servo control system position and speed estimation device, see Figure 6 The schematic structural diagram of the position and speed estimation device of the PMLSM servo control system shown includes: a resistance factor addition module 100 , a discrete linearization module 200 and an estimation module 300 .
[0165] Resistance factor adding module 100, for adding winding resistance factor in the state variable of PMLSM servo control system;
[0166] Discrete linearization module 200, for the discrete linearization model that the state equation of PMLSM servo control system is carried out discrete linearization to obtain;
[0167] The estimating module 300 is used for estimating the position and velocity by the extended Kalman filter method according to the discrete linearization model.
[0168] Further, the resistance factor adding module 100 is also used for:
[0169] Add resistance component x=[i to the system s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com