

Greenhouse-applied autonomous navigation intelligent variable-amount-of-mist spraying system and a control method thereof
An autonomous navigation and spray system technology, applied in the direction of non-electric variable control, two-dimensional position/channel control, control/adjustment system, etc., can solve the problem of slow measurement speed, low sensor accuracy, and reduced spray target accuracy. The use of pesticides Efficiency and other issues, to achieve the effect of improving precision, high flexibility, and improving the ability to adapt to the indoor environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Below in conjunction with accompanying drawing, the present invention is further described:
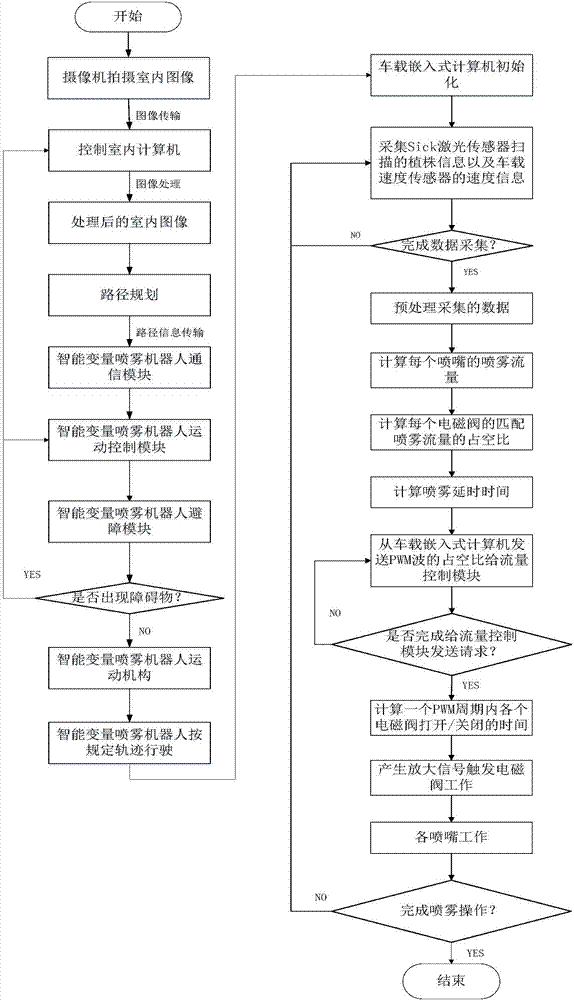
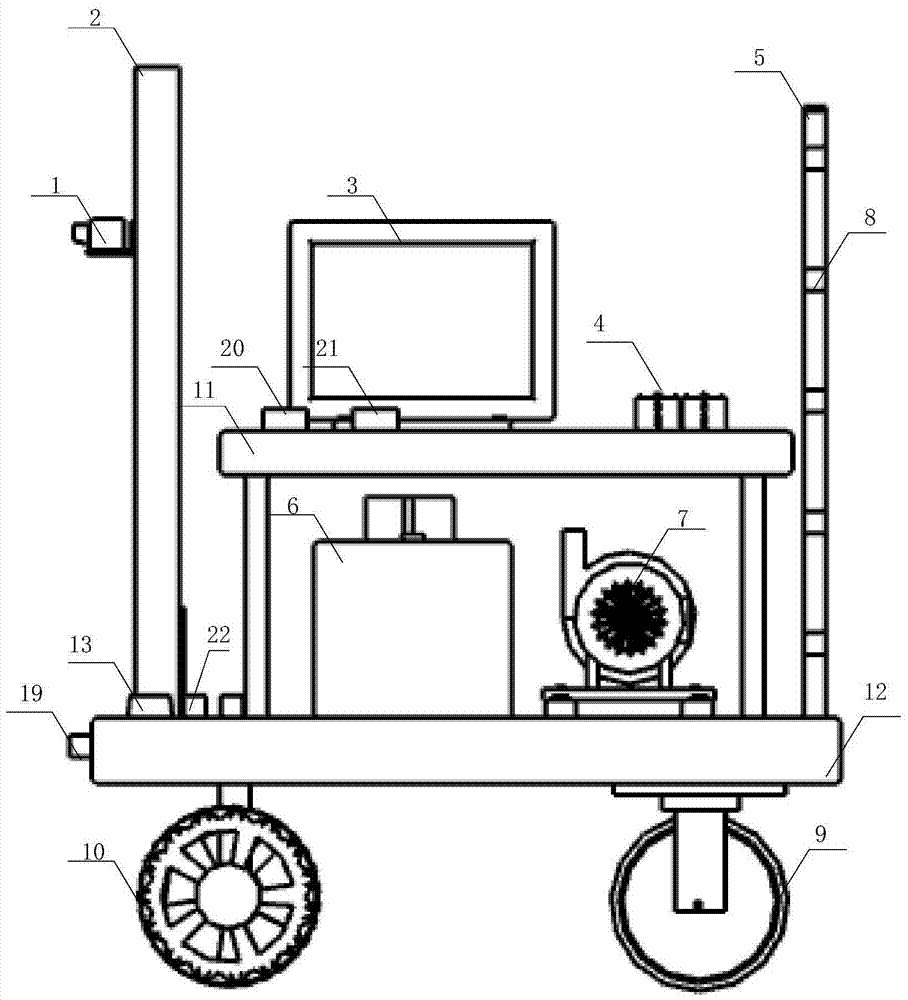
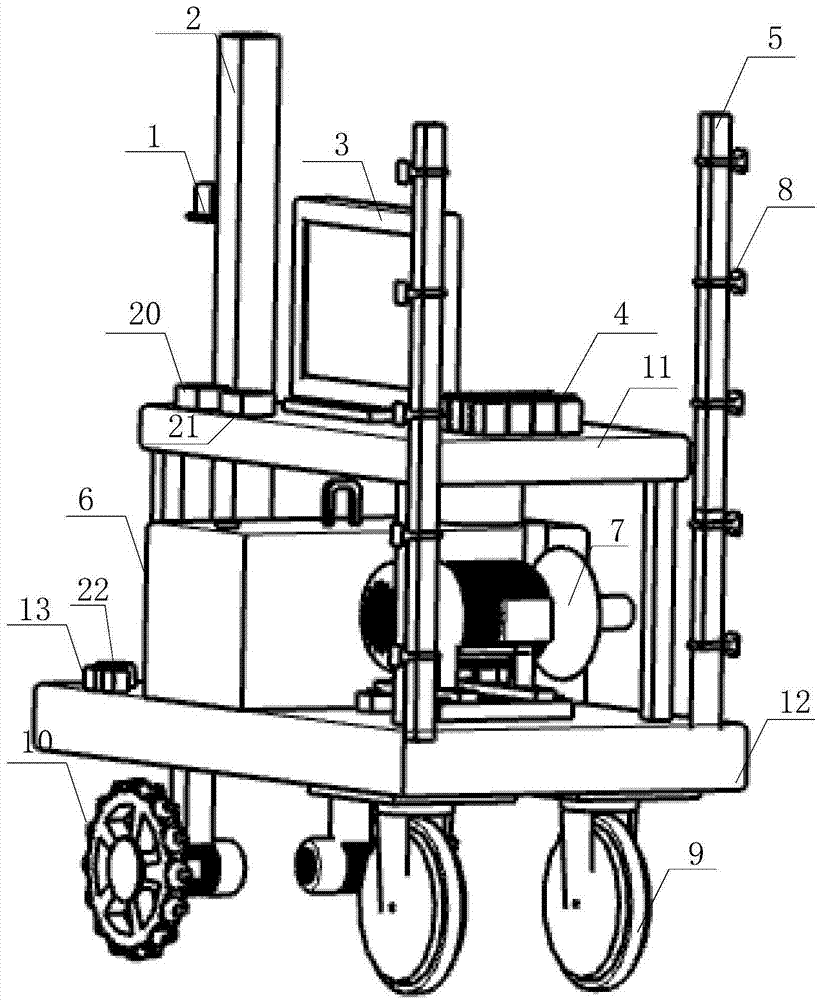
[0035] Such as figure 1 Shown is the workflow flow chart of the autonomous navigation intelligent variable spray system. The camera 15 is fixed on the top of the greenhouse to take images of the greenhouse ground, and transmits the greenhouse ground images to the control room computer 14 through the wireless network, and the control room computer 14 uses relevant software to process the greenhouse ground images captured by the camera 15, and draws according to the greenhouse ground images. Draw the rectangular coordinate map of the greenhouse floor. The operator in the control room plans the driving trajectory of the vehicle platform 17 in the rectangular coordinate diagram on the ground of the greenhouse, and transmits the trajectory information to the wireless communication module 20 in the vehicle platform 17 through the wireless network, and the motion control module 21 re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More