

Strong interference resistance control method of flexible spacecraft attitude control system
A flexible spacecraft and attitude control technology, which is applied in attitude control, space navigation equipment, space navigation aircraft, etc., can solve the problems of ignoring model nonlinearity, poor anti-interference ability, and low control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
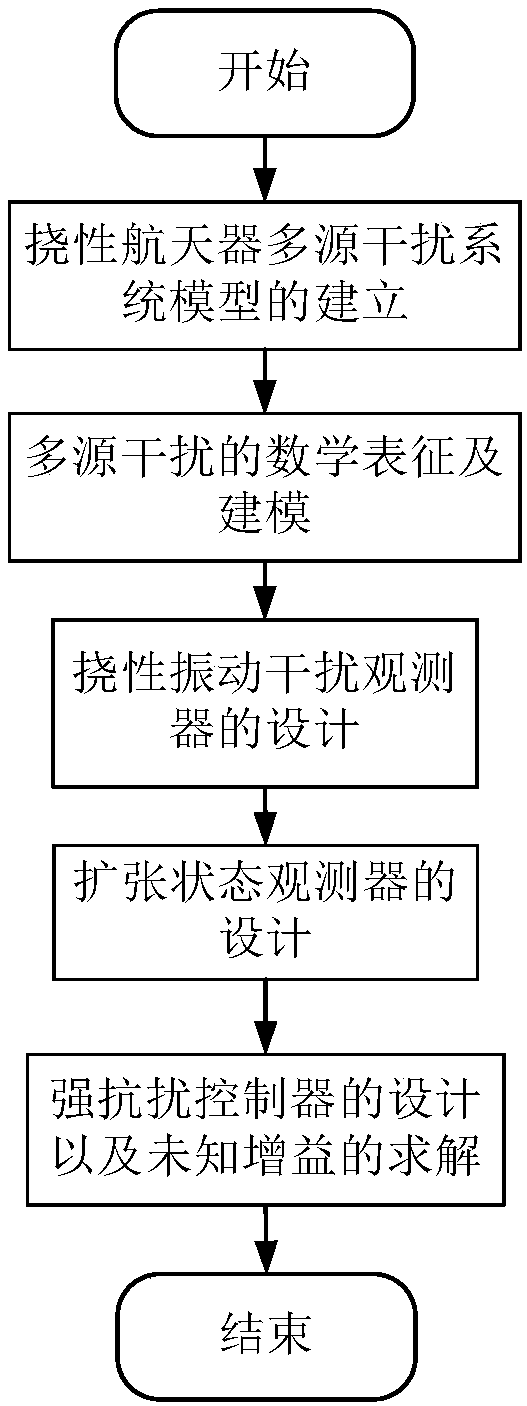
[0053] like figure 1 Shown, the concrete realization steps of the present invention are as follows:
[0054] The first step is to establish a multi-source interference model of the system according to the nonlinear Euler angle kinematics and attitude dynamics of the flexible spacecraft, and complete the mathematical characterization and modeling of multi-source interference:
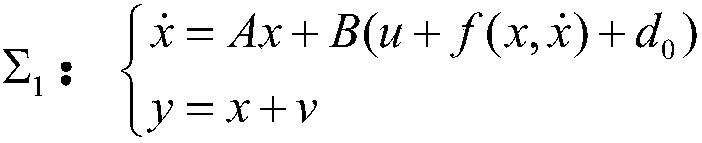
[0055] Multi-source interference model based on nonlinear Euler angle kinematics and attitude dynamics of flexible spacecraft∑ 1 As follows:
[0056]
[0057] in, Indicates the system status, and represent x respectively 1 with x 2 the transposition of θ and ψ respectively denote the roll angle, pitch angle and yaw angle of the flexible spacecraft, and Respectively represent the rate of change of roll angle, rate of change of pitch angle and rate of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More