

Intelligent clamping device and active control method therefor
A clamping device and active control technology, applied in the direction of workpiece clamping device, general control system, control/adjustment system, etc., can solve the problems of object damage, inability to consider the uncertainty of the geometric shape of the clamped object, poor applicability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
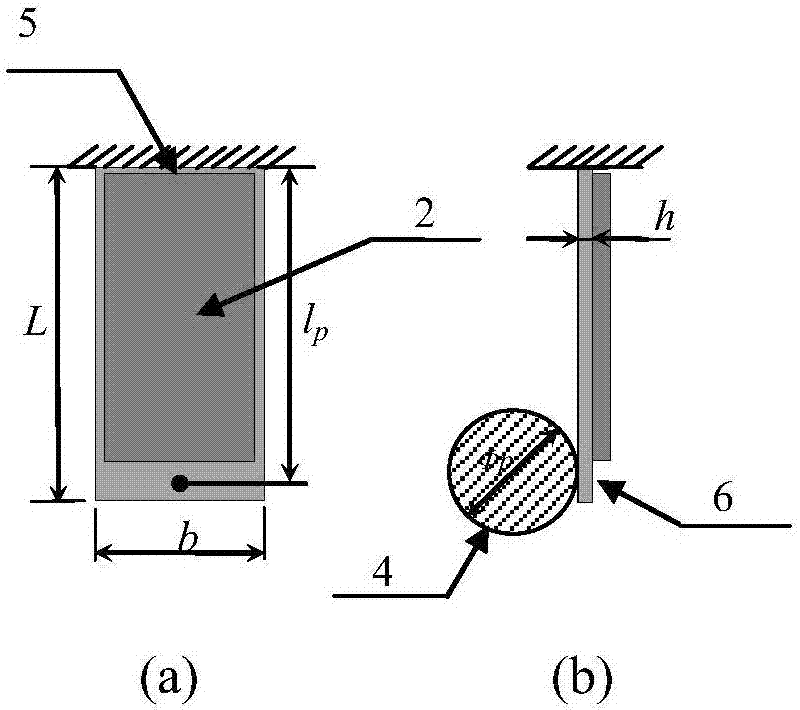
[0059] A cantilever beam model with a length, width and height of 80mm, 40mm and 0.43mm, respectively, pasted with MFC is used to represent the clamping claw in the present invention. The material density of the beam is 8110kg / m 3 , Young's modulus is 200GPa, Poisson's ratio is 0.3. The d33-type (M-5628-P1) MFC piezoelectric film (Smart Material Corp. http: / / www.smart-material.com / MFC-product-main.html) is used, and its maximum and minimum operating voltages are respectively +1500V and -500V. The contact point between the object to be clamped and the clamping jaw (namely point p) is located at 5mm from the end of the cantilever beam, and a mass block is used to simulate the contact load.
[0060] The experimental block diagram is as Figure 6 As shown, Simulink software is used to control the dSPACE semi-physical real-time control simulation system, and the KEYENCE LK-G150 sensor is used to measure the deformation, and the control signal is supplied to the MFC piezoelectric...
example 2
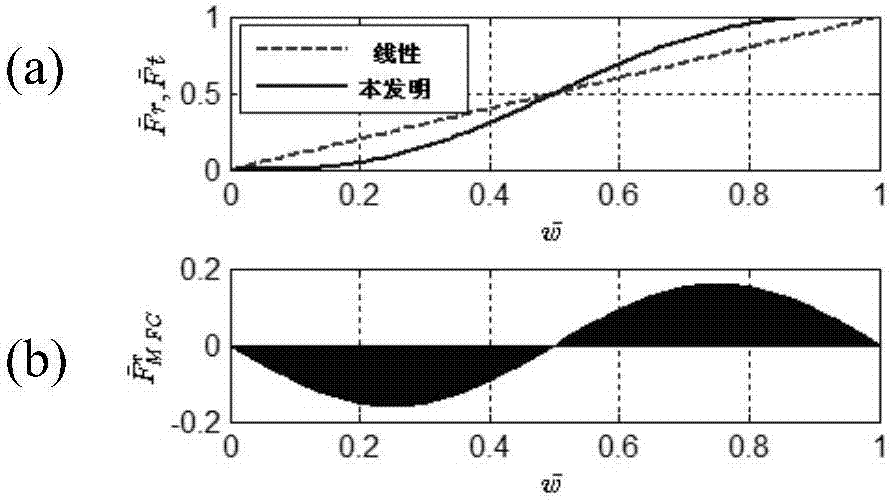
[0067] Example 2 is realized by simulation, and when a single clamping claw exerts a clamping force on the clamped object, the change of the acceleration of the contact point of the clamping claw reflects the change of the clamping force. Taking the experimental model in Example 1 as the object, assuming that the outer rotating ring rotates at an angular velocity ω, the deformation at point p changes linearly from 0 to w within 2s g , using the parameters obtained by the finite element method in Table 1 for numerical simulation verification. In order to illustrate the gentle clamping effect of the present invention, it is compared with the acceleration response of the point p (ie the acceleration during the process of clamping the clamped object) of the clamping jaw with fixed clamping stiffness (ie linear case) in this process. The result of feedforward control is as Figure 8 As shown, it can be seen that the acceleration response in the case of linear clamping stiffness is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More