Robot visual system for mine rescue and control method for robot visual system
A technology of robot vision and rescue robot, which is applied in the field of mine safety equipment, can solve the problems of low efficiency of manual rescue, life-threatening, low degree of rescue automation, etc., and achieve the effect of avoiding casualties of rescue personnel, improving the degree of automation, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
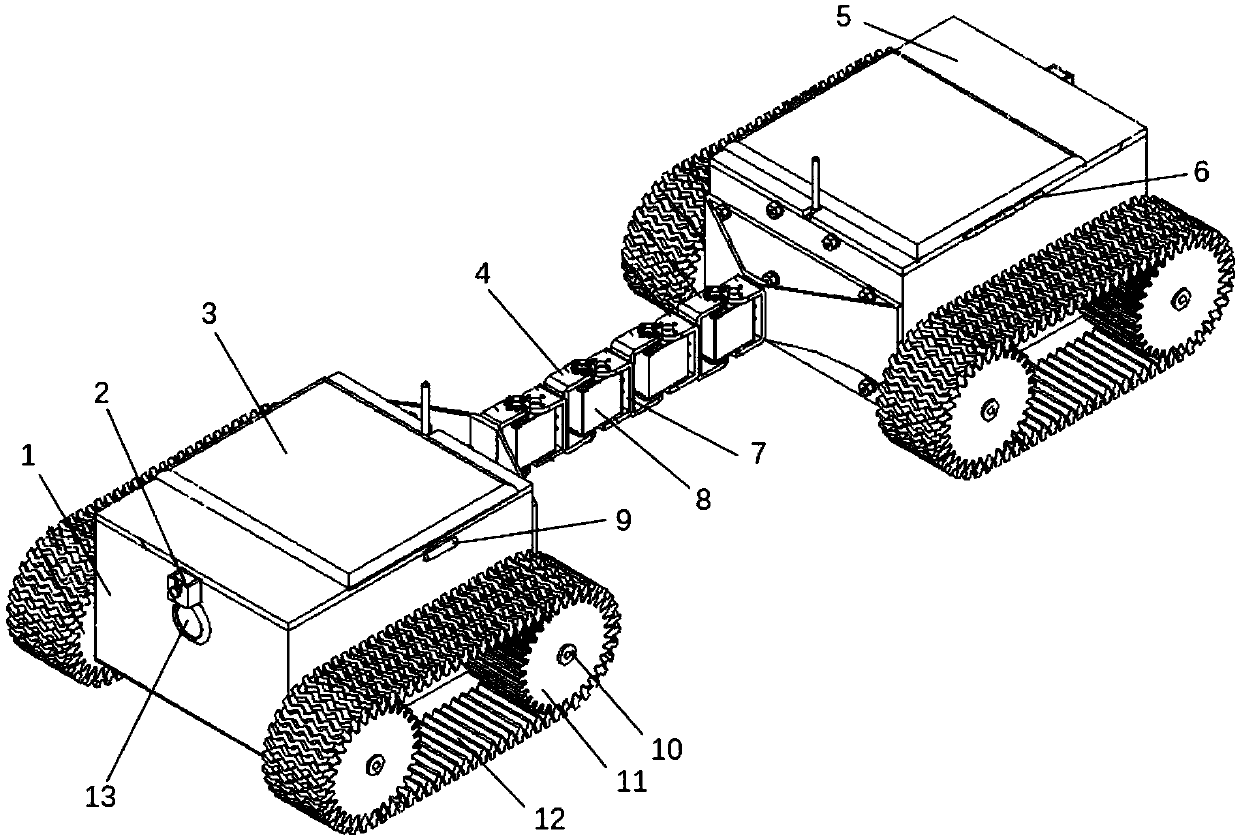
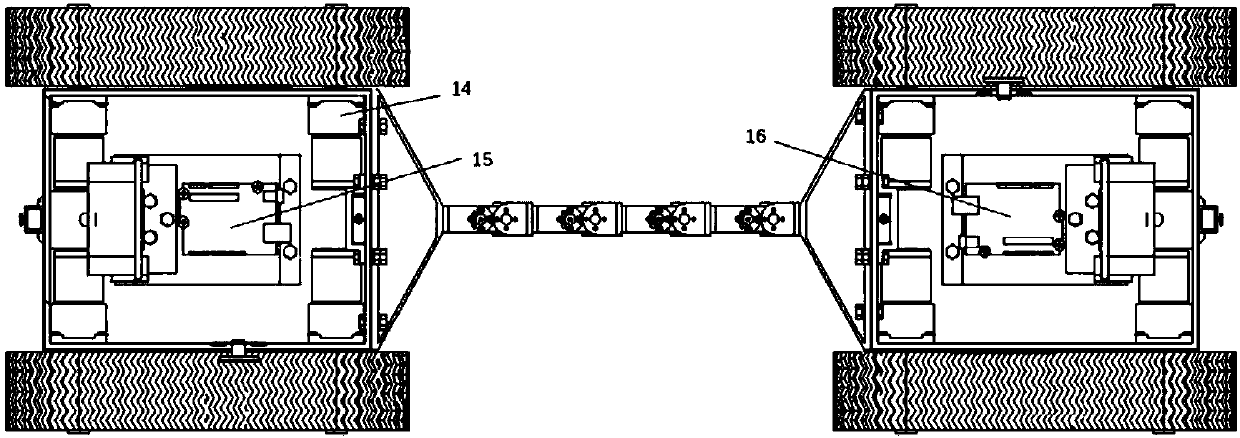
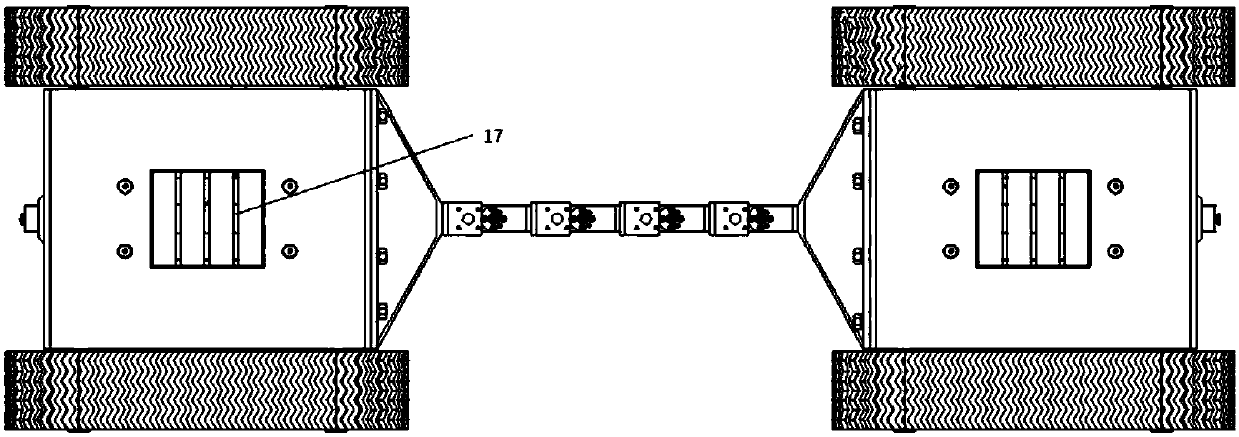
[0070] Embodiment 1: as Figure 1-14 As shown, a robot vision system for mine rescue includes a rescue robot and corresponding vision and control systems; the rescue robot is equipped with an environmental information acquisition unit for collecting on-site images, a drive unit, a connection and auxiliary unit, and a control processing unit The environmental information collection unit includes two cameras 2, two LED light sources 13; the driving unit includes eight DC motors 14, four steering gears 8, eight driving wheels 11 and four crawlers 12; the connection and auxiliary unit includes eight Shaft sleeve 10, two power supplies 17, four large U-shaped frames 4, four small U-shaped frames 7, two box covers 3, controller box 1, first-aid item box 5, rescue items 16, two The lid lifting buckle 9 and the two lid shafts 6; the control processing unit includes a controller 15; the vision and control system on the controller 15 includes an image acquisition module, an image proces...
Embodiment 2
[0113] Embodiment 2: as Figure 1-14 As shown, a robot vision system and its control method for mine rescue,
[0114] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. Implement the used equipment of rescue for the mine rescue robot vision system provided by the present invention (stereoscopic view, no cover top view and bottom view such as Figure 1-3 Shown), the controller environment is PC (Intel (R) Core (TM) 2Duo CPU T6570@2.10GHz, 2GB memory, realizes on the LabView2014 platform of Windows7-32bit. The image format that gathers among the present invention is stipulated as JPG format, and resolution The resolution is 1280×960 (such as Figure 7 and Figure 11 shown), the target in the figure is the mine road.
[0115] The robot vision system for mine rescue is the same as the system in embodiment 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com