

Interaction method and device, sweeping robot and medium
A sweeping robot and interactive method technology, applied in the field of devices, sweeping robots and media, and interactive methods, can solve the problems of low cleaning efficiency and poor user experience, and achieve the effect of ensuring comprehensiveness and improving cleaning comfort and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
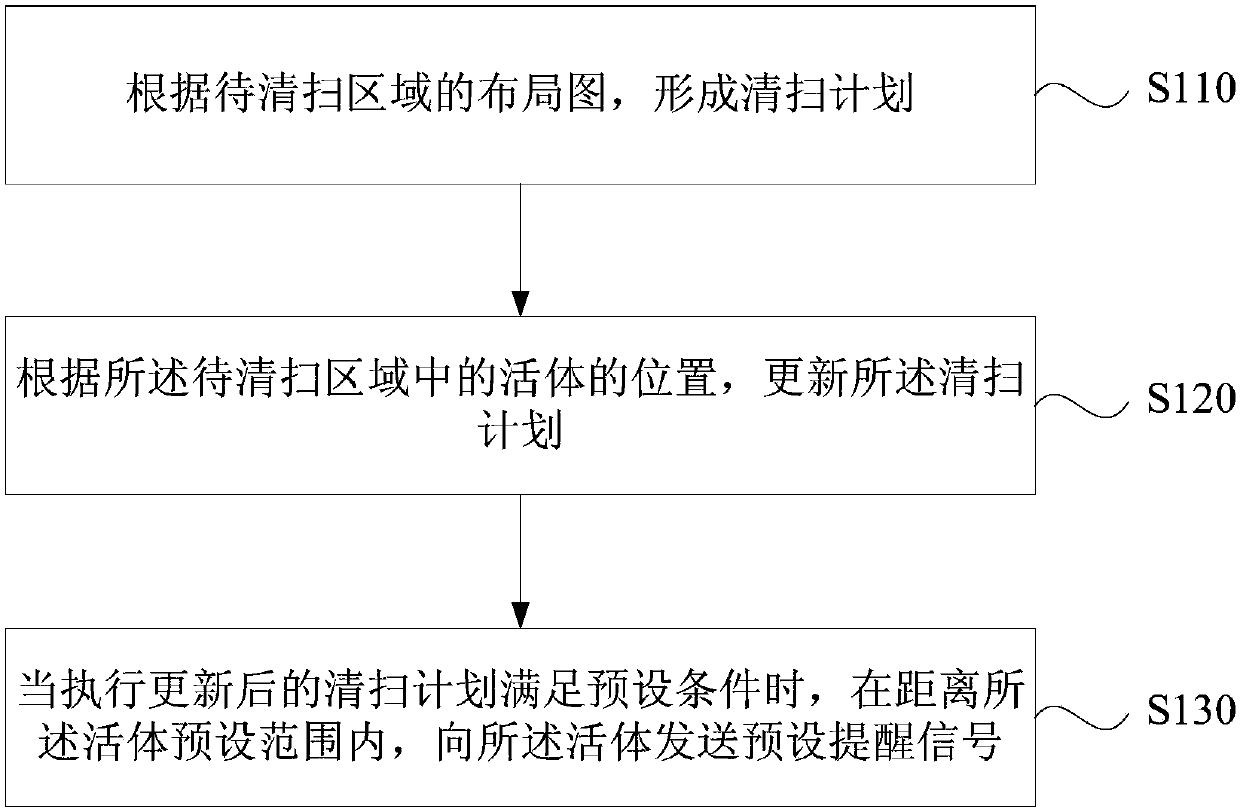
[0042] figure 1 It is a flowchart of an interaction method provided in Embodiment 1 of the present invention. The technical solution of this embodiment can be applied to the situation where the sweeping robot interacts with humans. The method can be executed by an interaction device provided in an embodiment of the present invention, and the device can be implemented in the form of software and / or hardware, and configured for use in a sweeping robot. The method specifically includes the following operations:
[0043] S110. Form a cleaning plan according to the layout of the area to be cleaned.
[0044] The sweeping robot can obtain the layout map of the area to be cleaned through the camera. The camera can be configured by the sweeping robot, or it can be a camera of a third-party terminal connected to the sweeping robot. According to the layout map of the area to be cleaned, a cleaning plan is formed, such as a cleaning route. Exemplarily, the cleaning route is a route p...
Embodiment 2
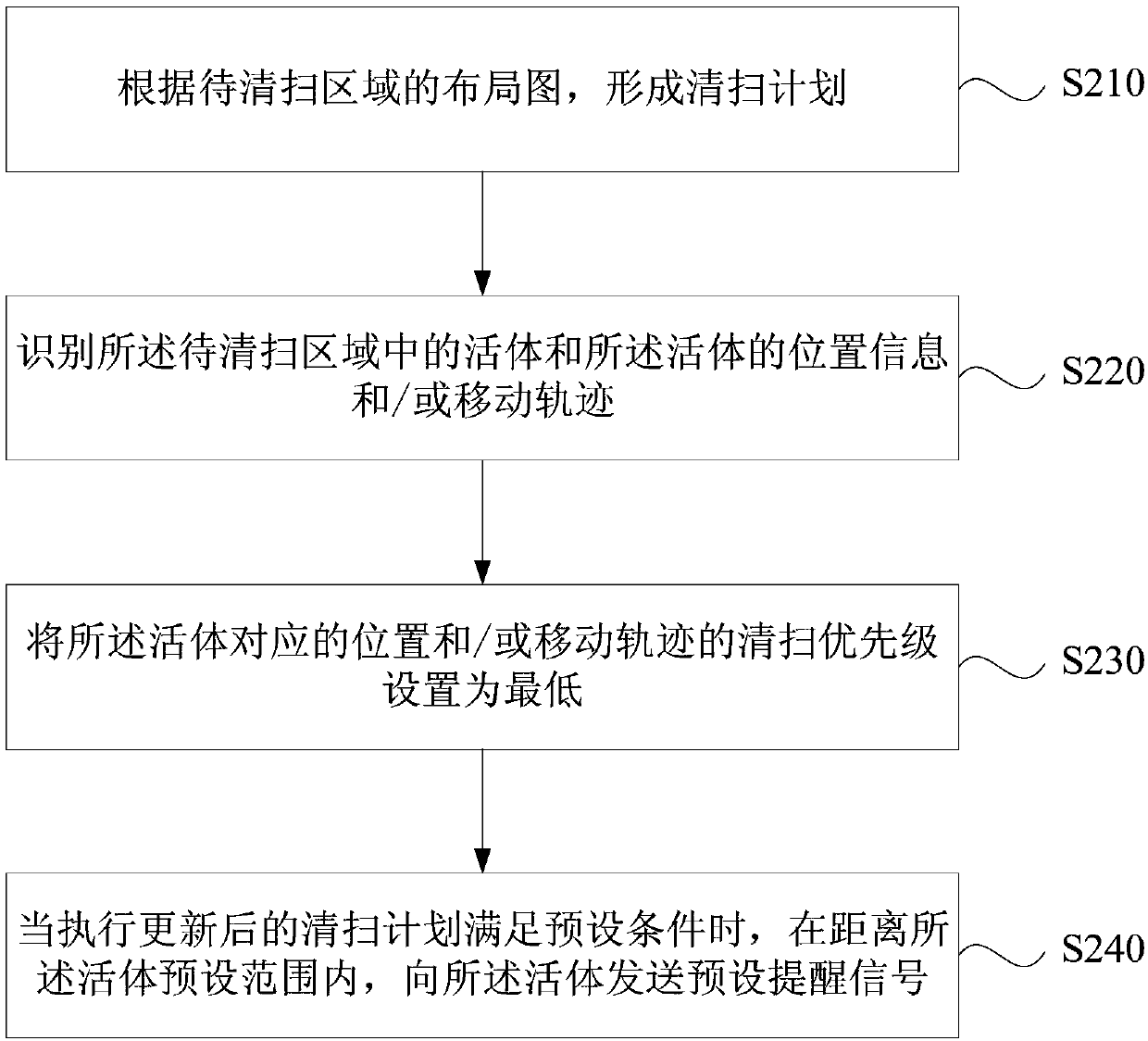
[0051] figure 2 It is a flow chart of an interaction method provided by Embodiment 2 of the present invention. On the basis of the above-mentioned embodiments, the embodiment of the present invention further optimizes the operation of updating the cleaning plan according to the position of the living body in the area to be cleaned.
[0052] Correspondingly, the method of this embodiment includes:
[0053] S210. Form a cleaning plan according to the layout of the area to be cleaned.
[0054] S220. Identify the living body in the area to be cleaned and the location information and / or movement track of the living body.
[0055] Since the position of the living body in the area to be cleaned can be moved, the movement trajectory will cause poor cleanliness of the ground. Therefore, the sweeping robot obtains the location information and / or movement trajectory of the living body, and adds the position and movement trajectory of the living body to the cleaning plan.
[0056] S230....
Embodiment 3
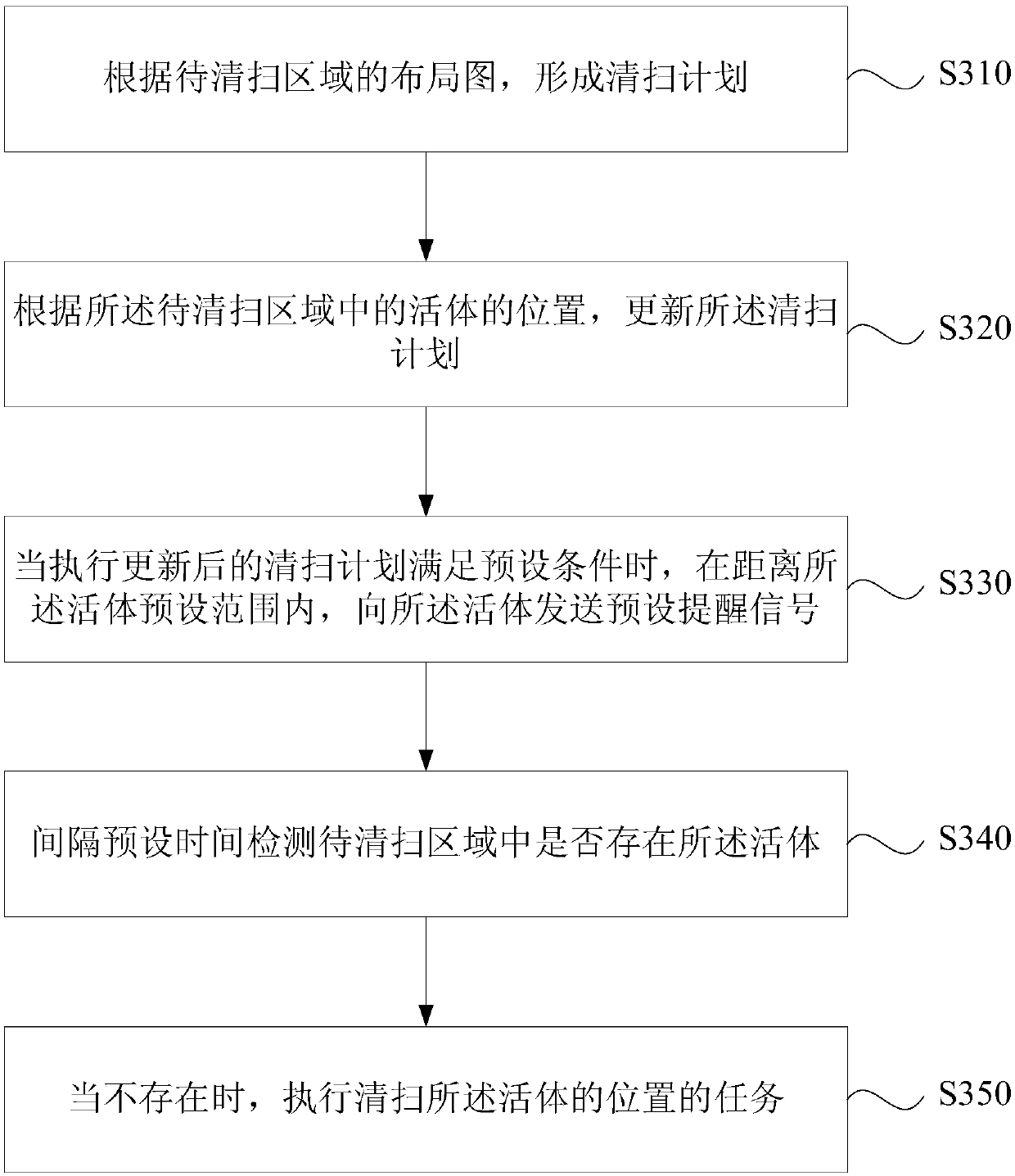
[0061] image 3 It is a flowchart of an interaction method provided by Embodiment 3 of the present invention. On the basis of the above-mentioned embodiments, the embodiment of the present invention further adds the operation of detecting whether there is still a living body in the area to be cleaned at preset intervals; if not, performing the task of cleaning the position of the living body.
[0062] Correspondingly, the method of this embodiment includes:
[0063] S310. Form a cleaning plan according to the layout of the area to be cleaned.
[0064] S320. Update the cleaning plan according to the location of the living body in the area to be cleaned.
[0065] S330. When the executed updated cleaning plan satisfies the preset condition, send a preset reminder signal to the living body within a preset distance from the living body.
[0066] The sending of a preset reminder signal to the living body within a preset range from the living body when the updated cleaning plan me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More