

A Nonlinear Aircraft Track Control Method
A control method and technology for an aircraft, which are applied in non-electric variable control, three-dimensional position/course control, vehicle position/route/altitude control, etc., and can solve problems such as limitations and inability to directly obtain the explicit solution of the angle of attack command and the throttle command.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
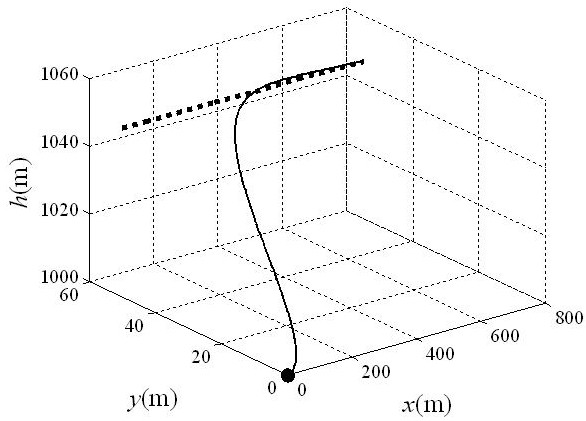
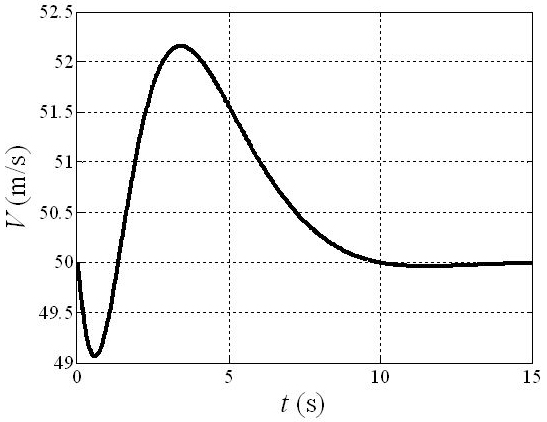
[0069] Carry out the trajectory control simulation of an aircraft, the initial position of the aircraft is [x(t 0 ) y(t 0 ) h(t 0 )] T = [0 01000] T , initial time t 0 =0s, the initial velocity amplitude is 50m / s, the initial track azimuth angle is 0deg, the initial track inclination angle is 0deg, the simulation time is taken as 15s, and the implementation steps of the control method are as follows:
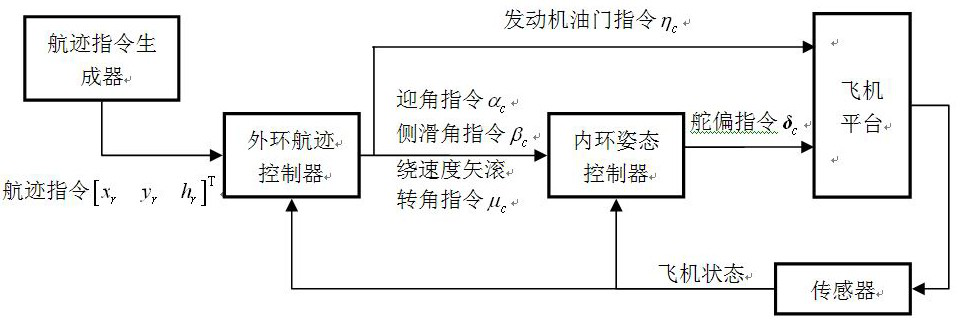
[0070] 1 track command generator input track coordinate command [x r (t) y r (t) h r (T)] T =[50(t-t 0 )50 1050] T To the outer ring track controller, the track command represents the straight and level flight of the aircraft along the x-axis direction, with a height of 1050m and a speed of 50m / s.
[0071] 2 The outer ring track controller obtains the position of the aircraft at the current moment t through the sensor [x y h] T , speed V, track azimuth χ, track inclination γ, according to the set track command [x r the y r h r ] T , follow the steps below to calc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More