

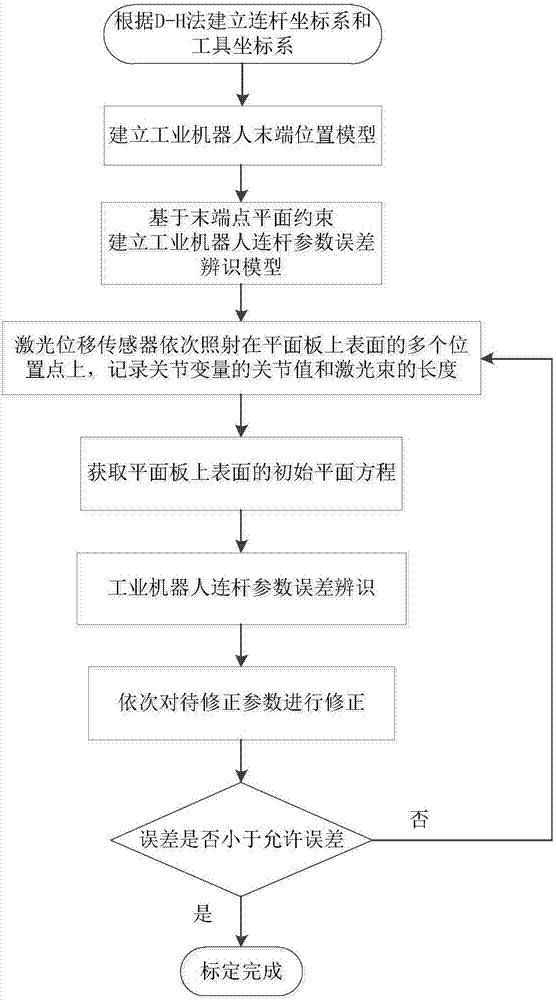
Calibration method of connecting rod parameters of industrial robot based on end-point plane constraint
An industrial robot, plane constraint technology, applied in manipulators, manufacturing tools, etc., can solve the problems of low degree of automation, low operability, low precision, etc., to reduce production costs, avoid low absolute positioning accuracy, kinematic model precise effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
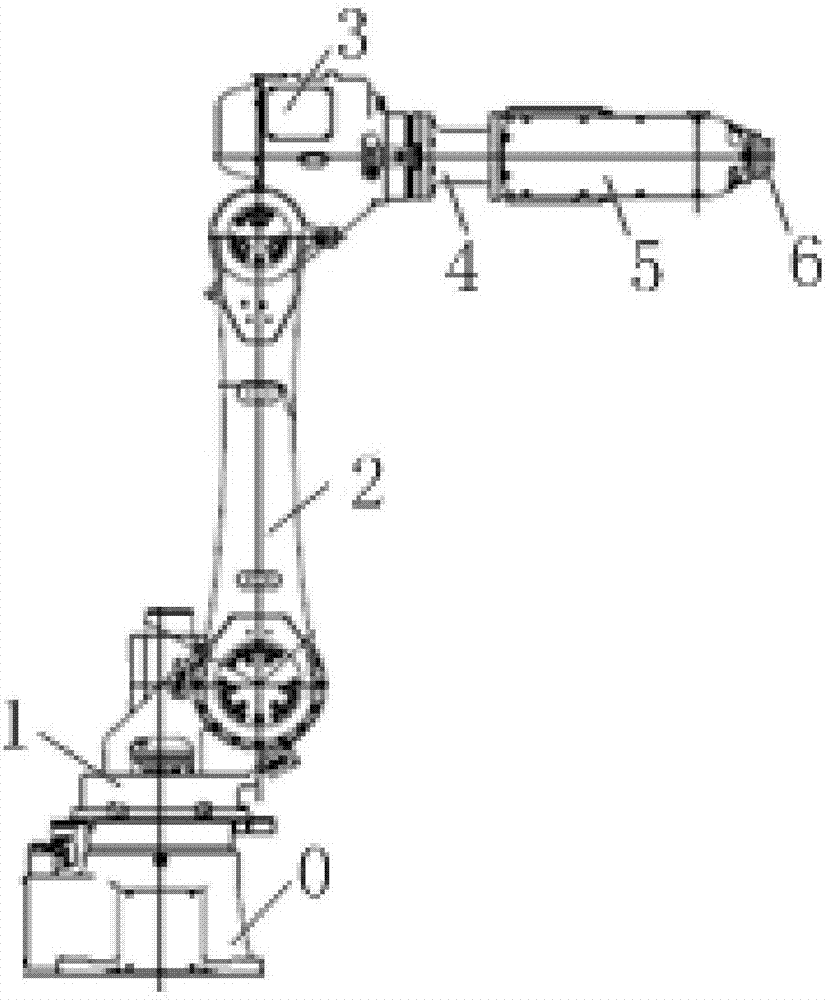
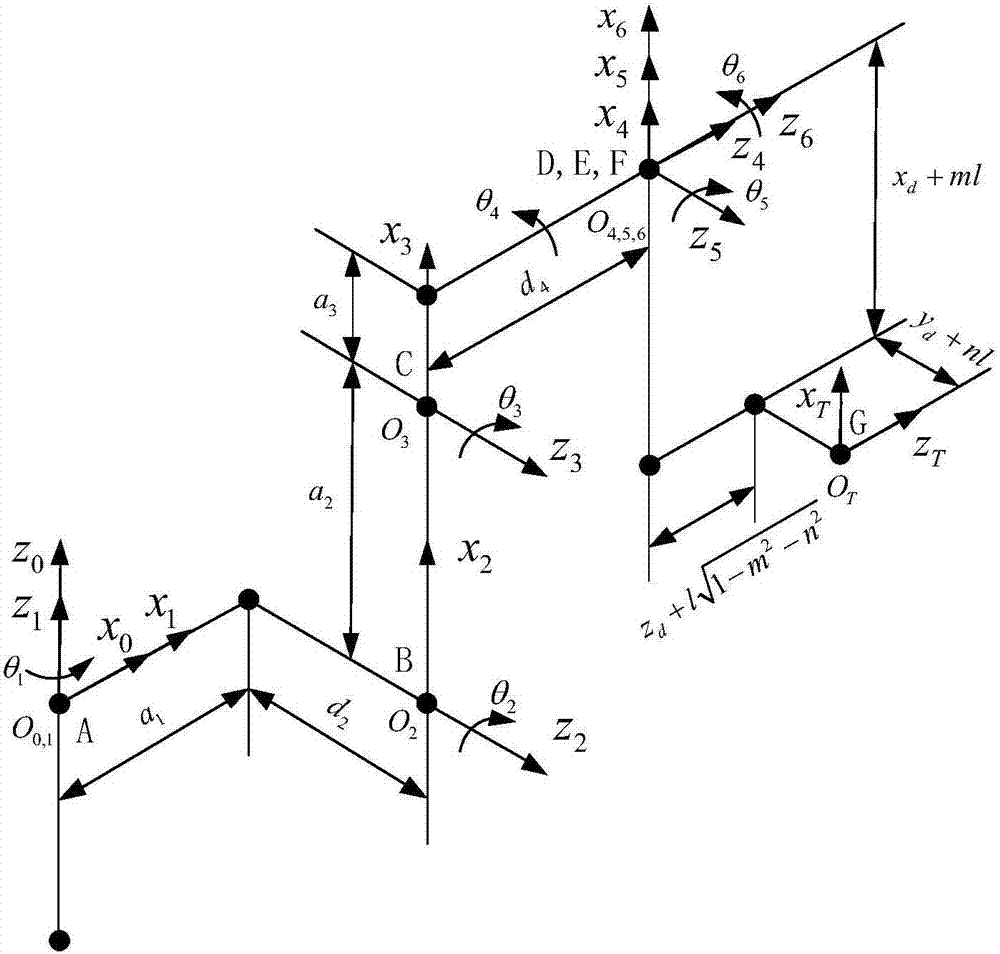
[0086] This embodiment takes Huazhong CNC 6012 industrial robot as an example, and its configuration is as follows figure 2 As shown, the Huazhong CNC 6012 industrial robot is an articulated robot, which consists of 6 revolving joints ( image 3 The points A, B, C, D, E, F shown) and 6 connecting rods ( figure 2 The 0-6 are connecting rod 0, connecting rod one, connecting rod two, connecting rod three, connecting rod four, connecting rod five, connecting rod six, connecting rod one to connecting rod six correspond image 3 The line segments AB, BC, CD, DE, EF, FG), the base is fixed and called link 0, the first joint connects the base and the first link, and the second joint connects the first link and the second The connecting rod, and so on, the tool is fixed to the connecting rod 6, and its connecting rod parameter calibration includes the following steps:
[0087] Step 1): According to the structural characteristics of the Huazhong CNC 6012 industrial robot and the DH method,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More