Polishing end effector suitable for robot
An end effector and robot technology, which is applied to the parts of grinding machine tools, grinders, manipulators, etc., can solve the problems of large size and quality of belt sanders, and is not suitable for robot grinding end effectors, and achieves light weight and good movement. Balanced performance, compact size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The grinding end effector suitable for robots proposed by the present invention will be further described in detail below with reference to the drawings and specific embodiments. Advantages and features of the present invention will be apparent from the following description and claims. It should be noted that the drawings are all in a very simplified form and use imprecise ratios, which are only used to facilitate and clearly assist the purpose of illustrating the embodiments of the present invention.
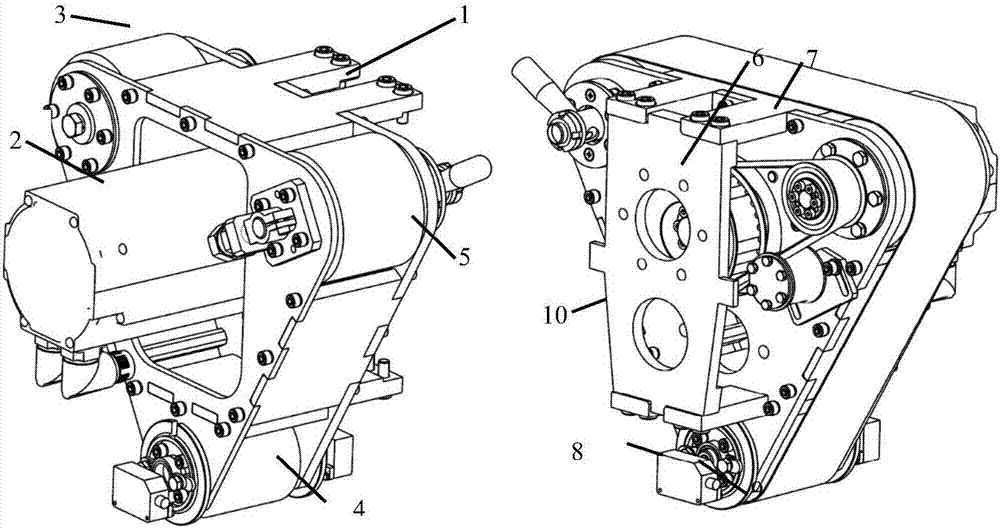
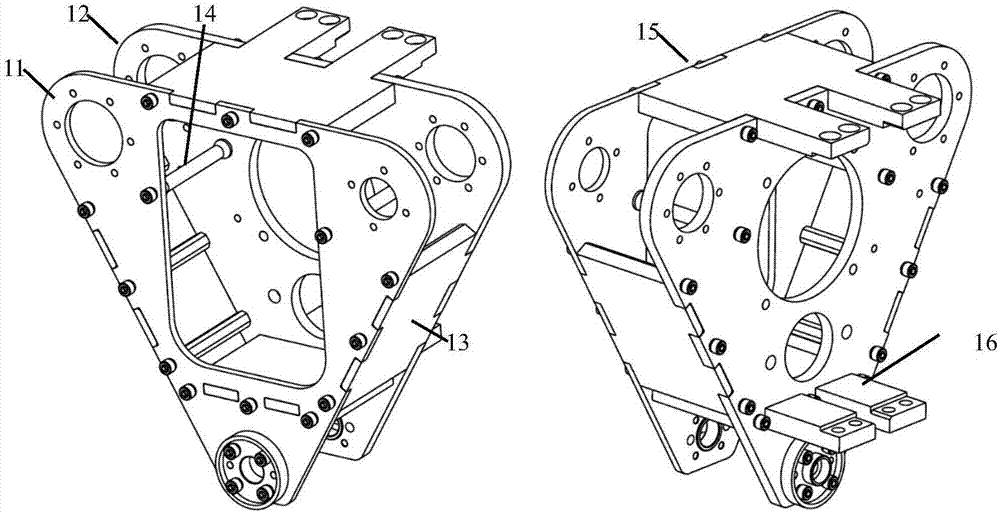
[0026] like figure 1 As shown, the present invention provides a grinding end effector suitable for robots, including a main body support frame 1, a driving motor 2, a driving wheel 3, a grinding wheel 4, a tensioning and adjusting wheel 5, a synchronous belt 6, an abrasive belt 7, The laser rangefinder 8, the backing plate 9, and the rear connecting plate 10; the grinding end effector is in the shape of a triangle as a whole, and the three rubber wheels are respectivel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com