

Linear servo position tracking control based on linear matrix inequality and sliding mode control
A linear matrix, tracking controller technology, applied in the field of numerical control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
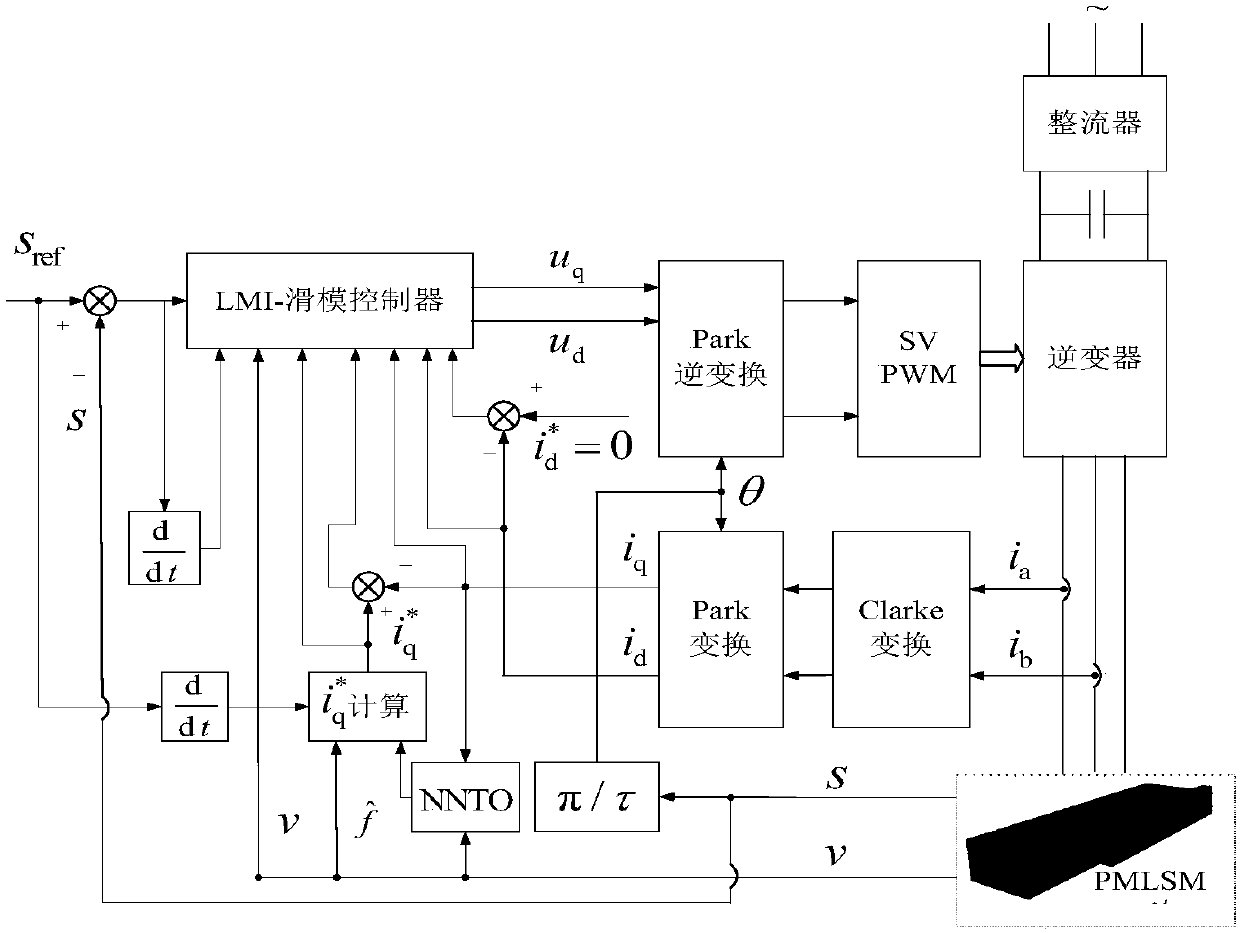
[0096] Embodiments of the present invention provide a linear servo position tracking control system and method based on a combination of linear matrix inequality and sliding mode control, which can achieve good robust speed tracking performance for position commands in high-speed and high-precision situations.
[0097] Realize the concrete steps of the present invention as follows:
[0098] Step 1: The nonlinear mathematical model of the permanent magnet linear synchronous motor is established.
[0099] The axis of the permanent magnet's fundamental excitation field is taken as the d-axis, and its counterclockwise rotation of 90° electrical angle is taken as the q-axis, so that the current vector of the mover is orthogonal to the magnetic field of the stator in space. Neglecting magnetic circuit saturation, the nonlinear dynamic mathematical model can be expressed as follows:
[0100]
[0101]
[0102] ψ d =L d i d +ψ f (7)
[0103] ψ q =L q i q (8)
[0104] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More