

Two-leg climbing polling robot
A technology for patrolling robots and feet, which is applied in the field of robots, can solve problems such as low movement speed and load capacity, low utilization rate of magnetic adsorption force, and low ability of robots to overcome obstacles, so as to improve work efficiency and economic benefits. Lightweight and compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions of the present invention will be further specifically described below through the embodiments and with the help of the accompanying drawings.
[0039] One, at first introduce the specific structure of the present invention.
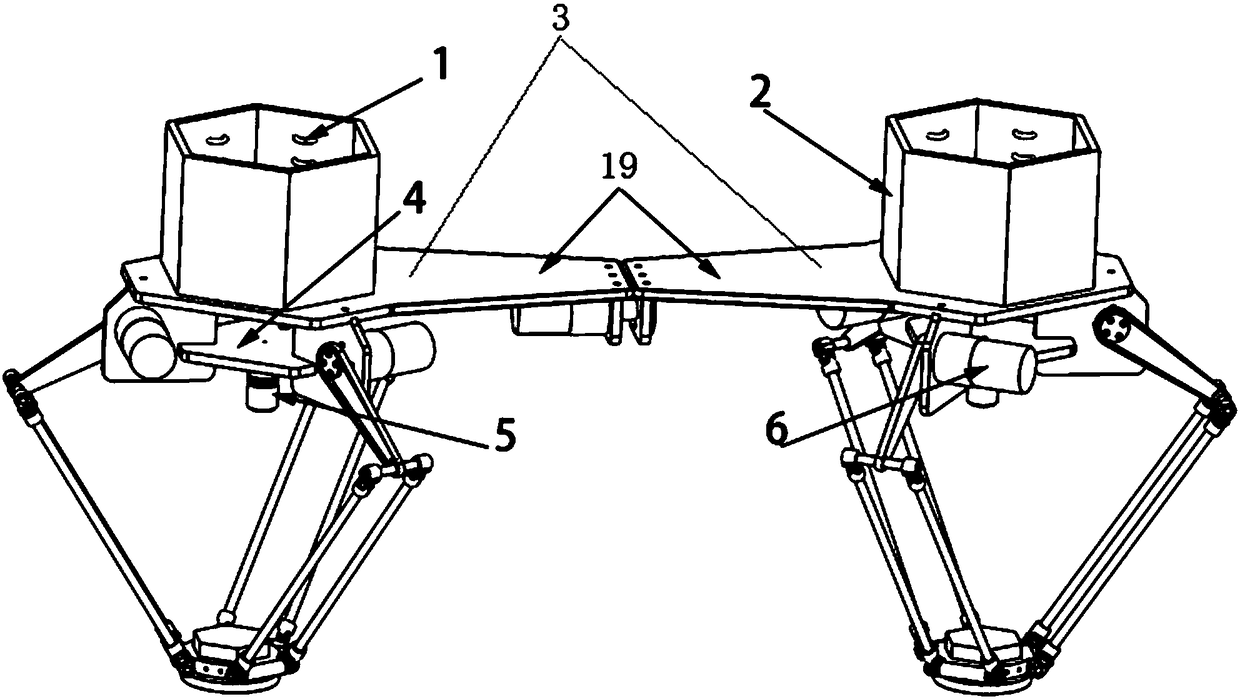
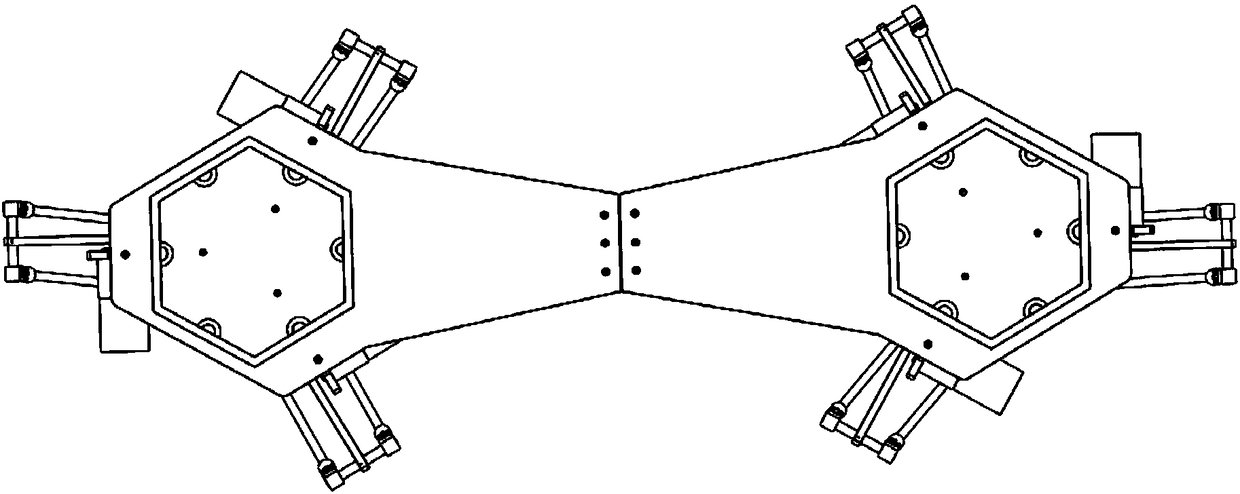
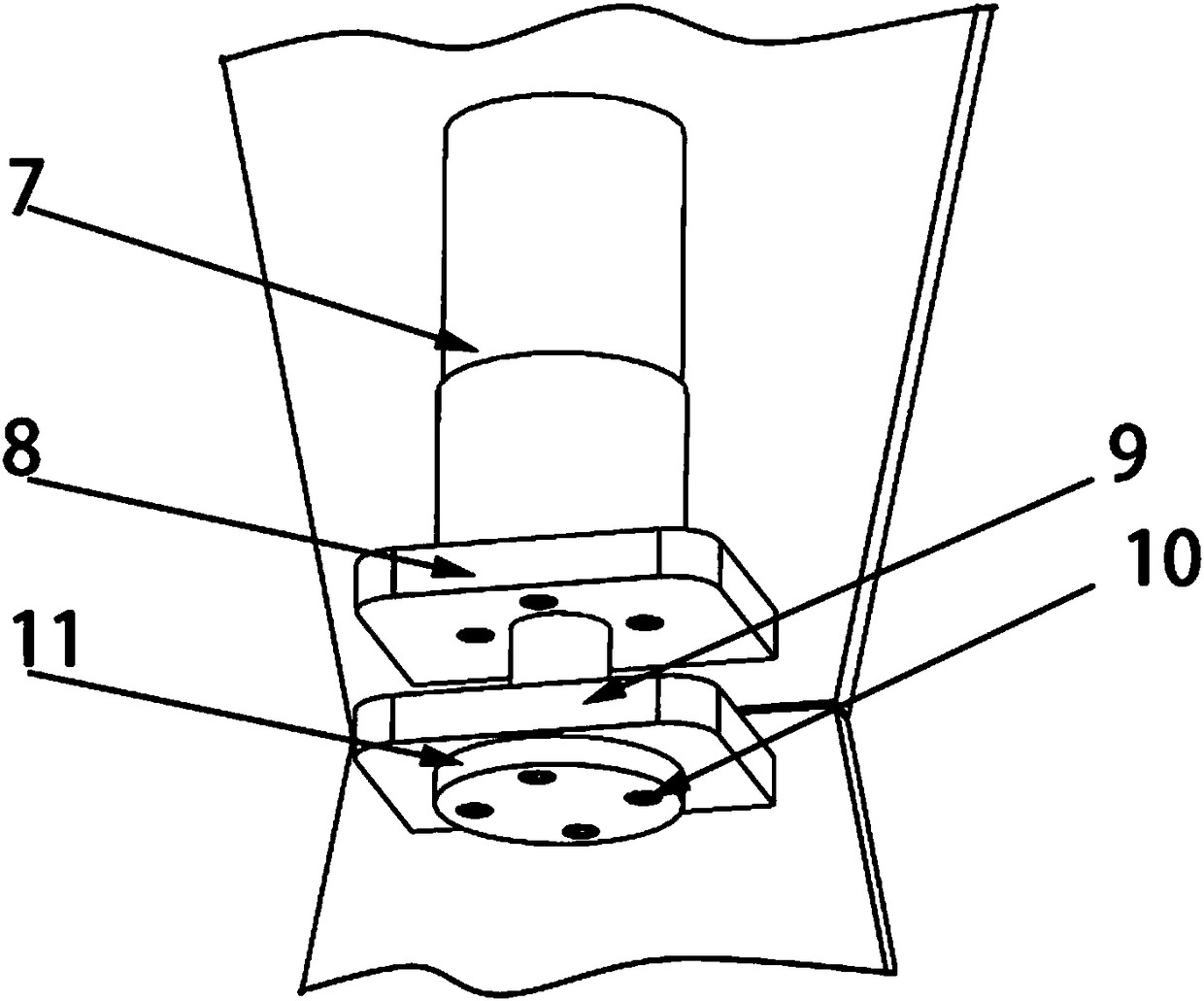
[0040] Overall structure of the present invention is as figure 1 As shown, the left and right symmetrical movable manipulators are composed of hip rotation joints, including a hip rotation joint, a pair of tool boxes 2, a pair of hip platforms 3, a pair of Delta parallel manipulators, and a pair of camera detection modules 5 , a pair of electromagnetic feet 18 . Wherein the hip rotation joint is made up of the hip rotation joint motor 7, the hip rotation joint motor seat 8, the hip rotation flange shaft 11 seat 9, the fastening bolt 10, and the hip rotation flange shaft 11; the Delta parallel manipulator is composed of a fixed Platform 4, driving motor 6, driving motor seat 12, driving arm 13, driven arm 14, hinge 15, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More