

Steel box beam inspection method using collecting robot and deep learning algorithm
A deep learning and robotic technology, applied in the field of steel box girder crack monitoring, can solve the problems of inability to respond to steel box girder cracks in time, low identification accuracy, and long detection period, and achieves a reduction in acquisition time, high identification accuracy, and time saving. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
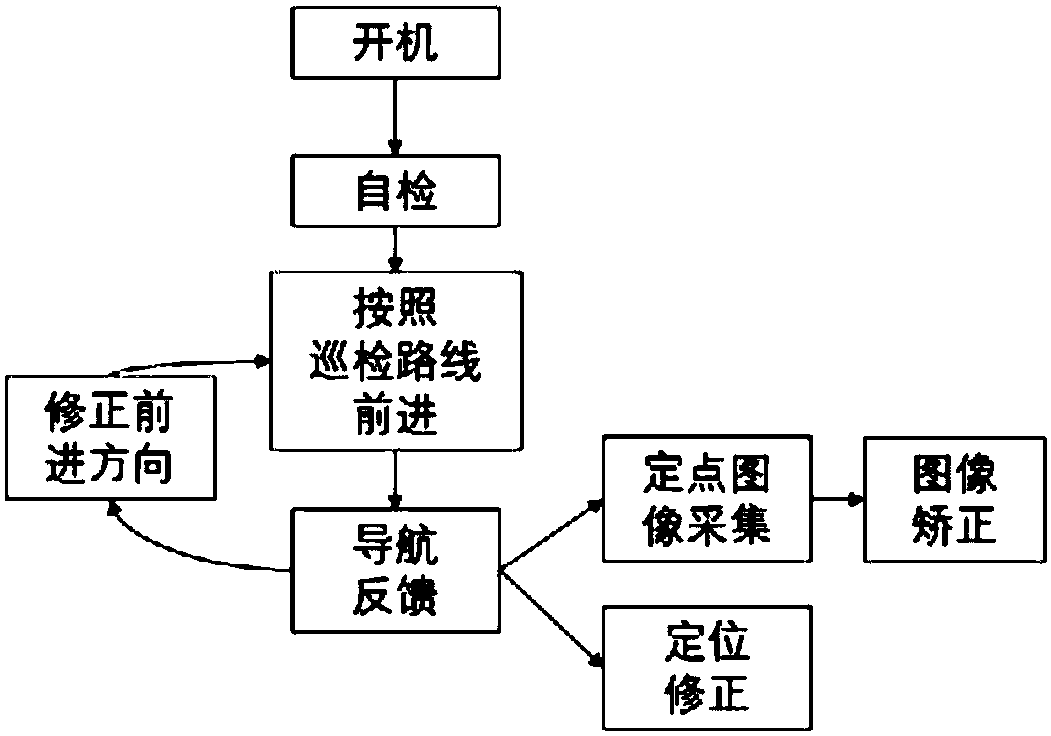
[0037] Such as Figure 4 As shown, the present invention firstly designs the inspection route of the robot according to the drawing of the standard section of the steel box girder. The route should take into account the viewing angle and definition requirements of image acquisition when the robot is walking.
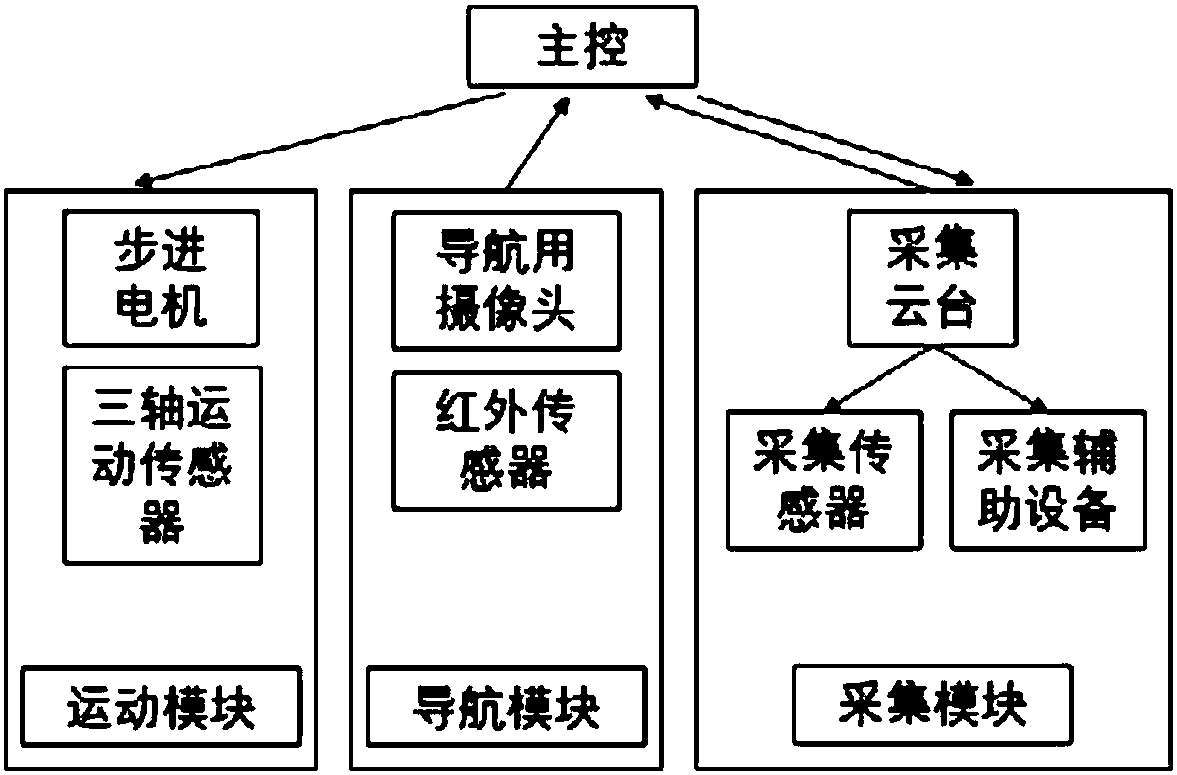
[0038] Then place the robot in a certain beam section and collect information according to the designed inspection route. During the inspection, the camera and other sensors in the navigation module and the step control of the stepper motor are used to accurately perceive the time course position of its movement. When collecting, adjust the angle of the multi-degree-of-freedom gimbal, use auxiliary equipment such as fill lights to ensure that the ambient light source remains relatively consistent, and record the position during collection. After collecting the information of a beam segment, move to the next beam segment to collect.
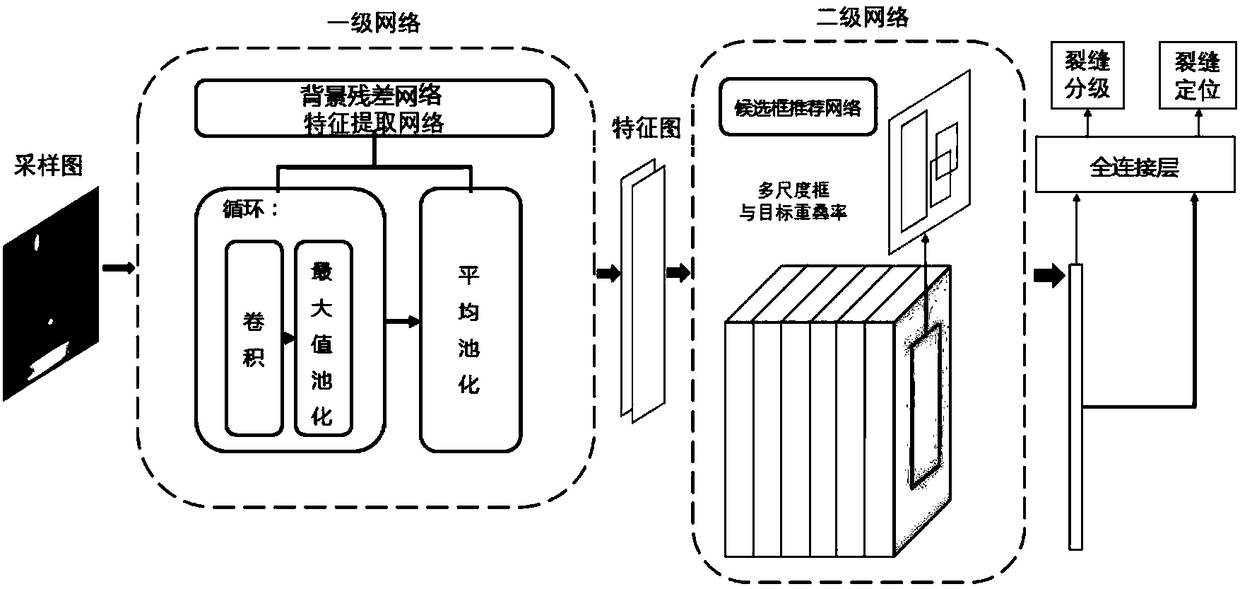
[0039] After the image training se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More