Laser Ablation Telecentric Stabilization Mechanism
A laser ablation and telecentric technology, applied in laser welding equipment, manipulators, program-controlled manipulators, etc., can solve the problems of complex structure, high cost, large end inertia, etc., and achieve the effect of ensuring small inertia and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
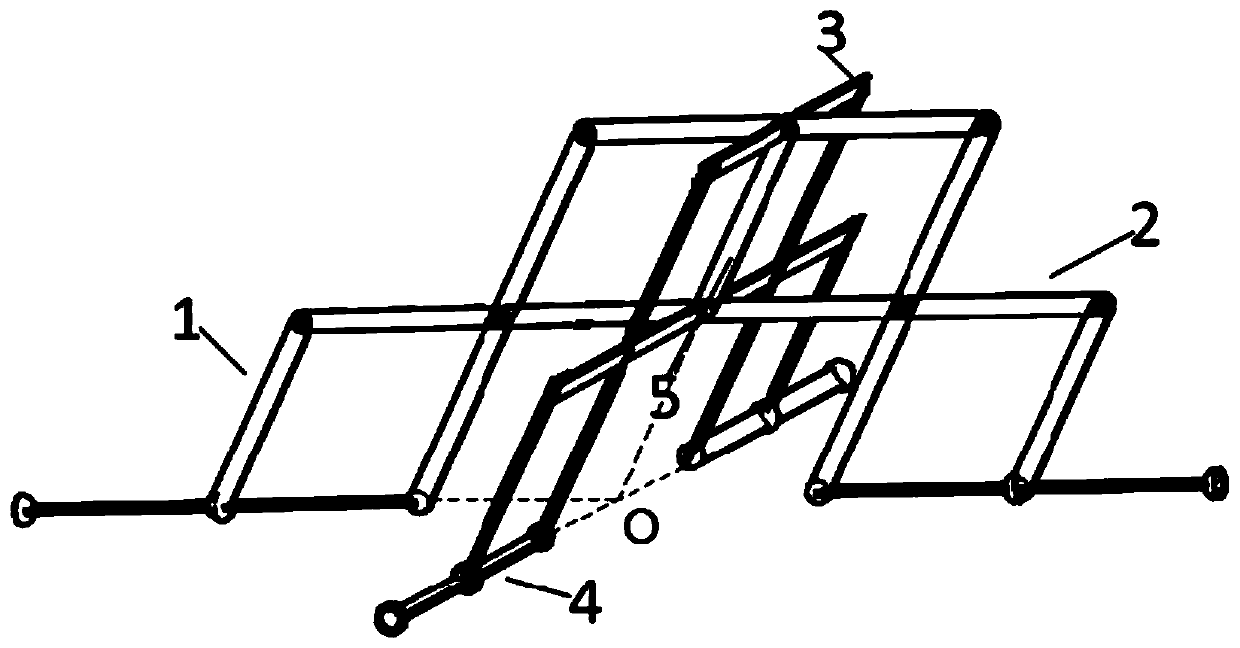
[0022] Such as figure 1 As shown, the laser ablation telecentric stabilization mechanism provided by the embodiment of the present invention includes a first parallelogram motion unit 1, a second parallelogram motion unit 2, a third parallelogram motion unit 3, a fourth parallelogram motion unit 4 and Central pole 5; wherein, the first parallelogram movement unit 1 and the second parallelogram movement unit 2 are in the first plane, and the third parallelogram movement unit 3 and the fourth parallelogram movement unit 4 are in the second plane. Before the movement, the first plane is perpendicular to the second plane, and the intersection of the downward extension line of the central rod 5 and the line connecting the bases of the first parallelogram movement unit 1 and the second parallelogram movement unit 2 is point O.
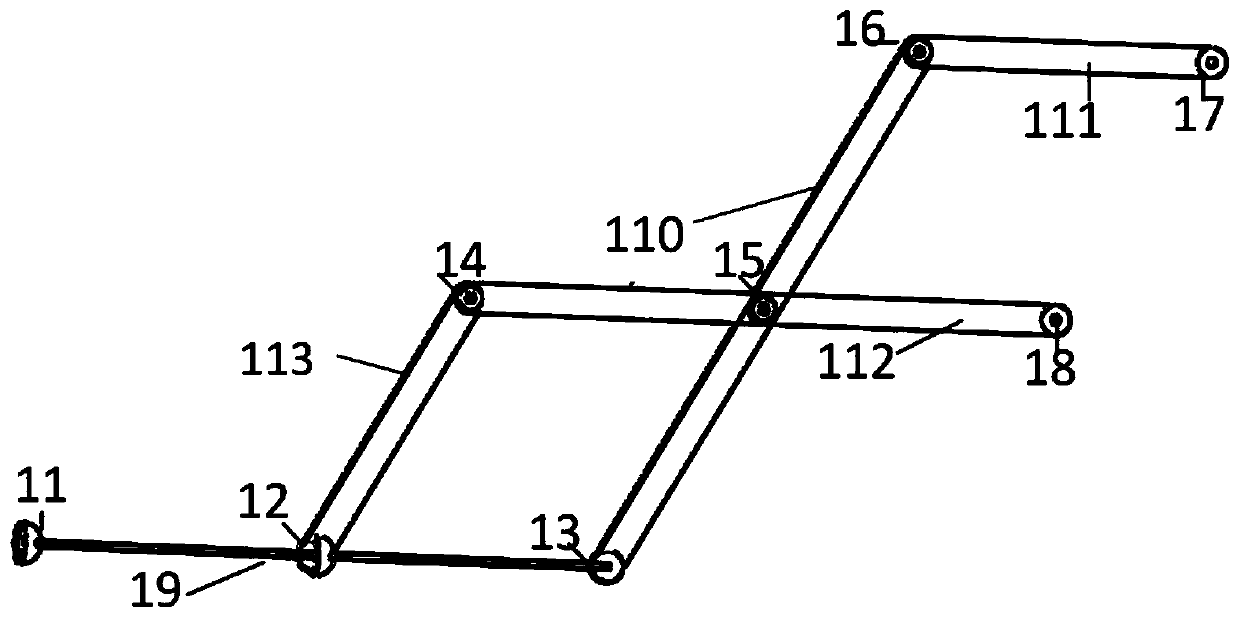
[0023] Further, such as figure 2 As shown, the first parallelogram motion unit 1 includes: a first spherical joint 11, a second spherical joint 12, a thir...
Embodiment 2
[0029] The difference from Embodiment 1 is that one end of the first connecting rod 19 in the laser ablation telecentric stabilization mechanism in this embodiment is fixedly connected to the frame, and the second connecting rod in the second parallelogram motion unit 2 The bar is also fixedly connected with the frame, the third one link in the third parallelogram motion unit 3 is also fixedly connected with the frame, and the fourth one link in the fourth parallelogram motion unit 4 is also fixedly connected with the frame, At this time, each motor can be installed on its corresponding horizontal connecting rod. The axis of the motor is parallel to the horizontal connecting rod, and it is connected with the connecting rod to be controlled by a ball joint coupling. For example: the first motor is installed On the first connecting rod 19, its axis is parallel to the first connecting rod, and its axis is respectively connected with the fifth connecting rod 113 and the second conn...
Embodiment 3
[0031] The difference from Embodiment 1 is that the laser ablation telecentric stabilization mechanism in this embodiment only has the first parallelogram motion unit 1, the second parallelogram motion unit 2 and the central rod 5, and other structures are similar, and no longer repeat.
[0032] In this embodiment, the two parallelogram motion units are connected through the rotating pair on the central rod 5 and are in the same plane. The connection between the two parallelogram motion units can realize the rotation of the final laser with the O point as the center of the sphere, that is The telecentricity is stable, and the introduction of two motion units can reduce the defect of high end inertia of one motion unit.
[0033] It can be seen that the structure of the laser ablation telecentric stabilization mechanism provided by the present invention is relatively simple, suitable for the field of laser ablation, and can achieve telecentric stabilization. The number of units ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com