

Multiple closed-loop composite gyroscope stable control method
A technology of gyro stabilization and control method, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of not considering gyro suppression, poor real-time performance of control system, low system static stability accuracy, etc., to improve accuracy and anti-interference ability, realize the effect of inertial space stability and suppress static drift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
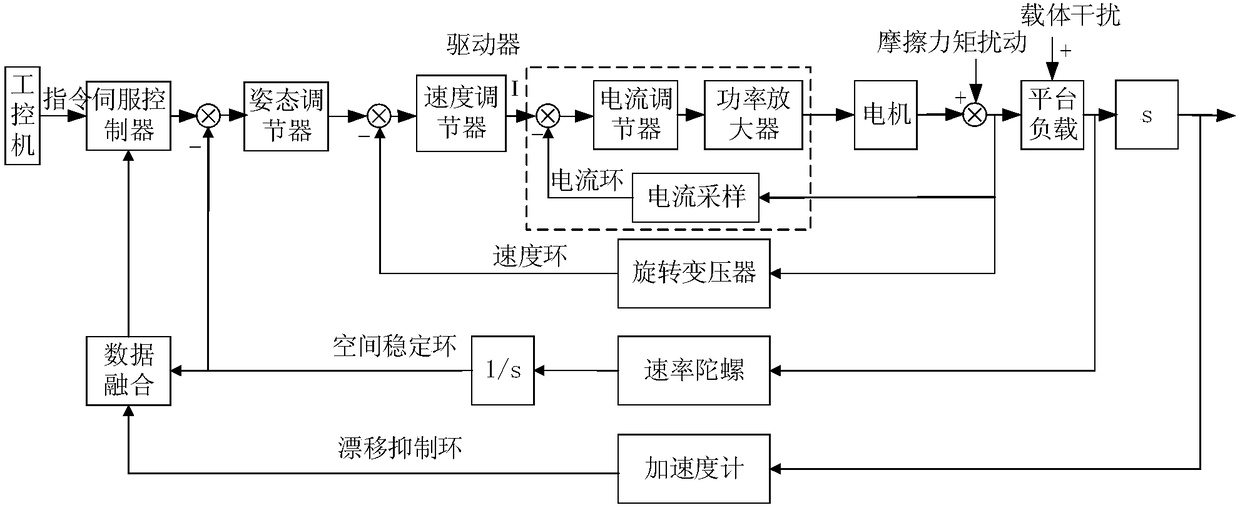
[0023] Embodiment: a kind of multi-closed-loop composite gyro stabilization control method includes a double-closed-loop control method, and the double-closed-loop control method includes a double-closed-loop control system, such as figure 1 As shown, the double closed-loop control system includes the current loop, the motor speed loop, the space stability loop and the drift suppression loop. The current loop is composed of the current sensor inside the driver to form the negative feedback of the armature current to reduce the influence of current and voltage fluctuations and improve Control the linearity of the torque, so as to realize the stable control of the current, so that it does not change suddenly. The stability loop control of the system is composed of the speed loop and the stability loop double closed-loop control structure, mainly to reduce the influence of the friction torque of the system on the system control performance and For the influence of body disturbance...
Embodiment 2
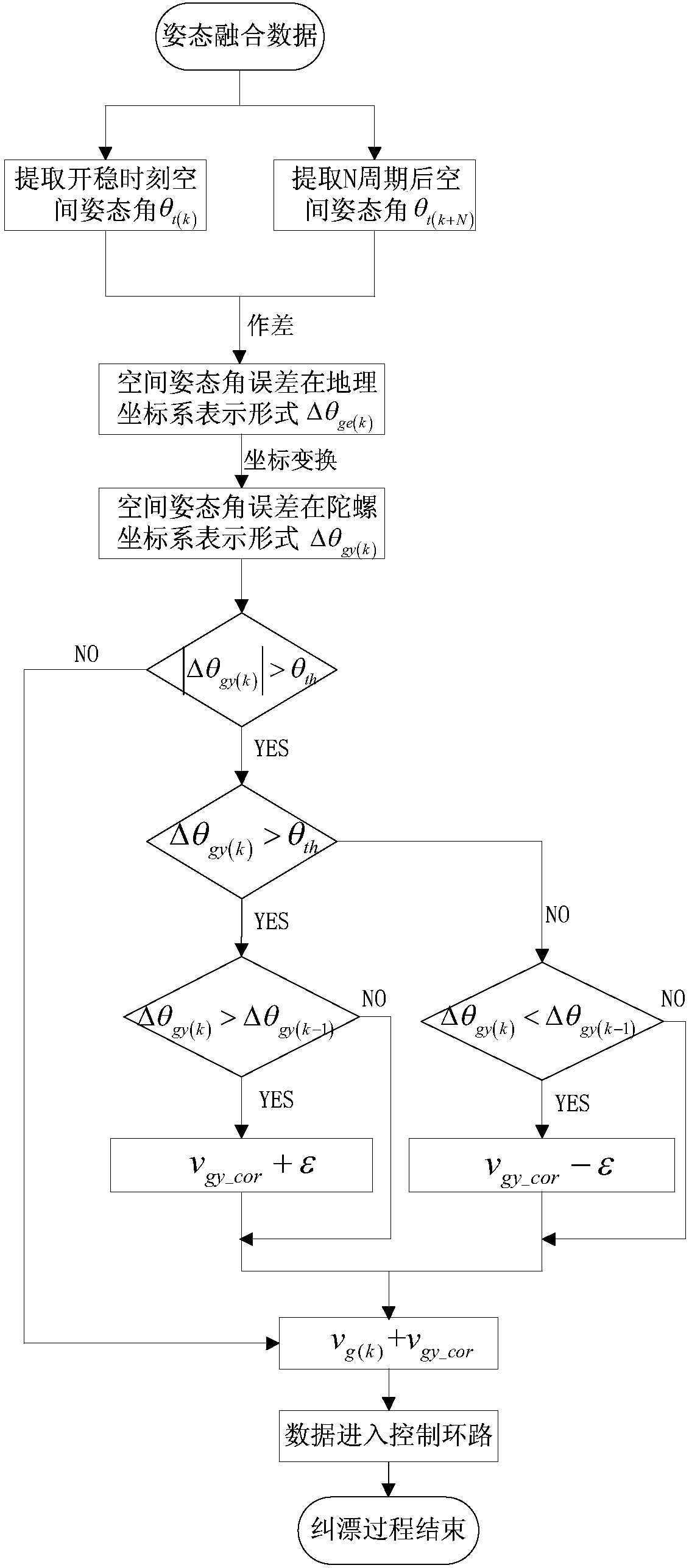
[0029] Embodiment 2: as Figure 1-Figure 2 As shown, a multi-closed-loop compound gyro stabilization control method, is the initial position value of the platform relative to the inertial space when the stability is turned on, is the space attitude angle after N cycles, since the control method of the azimuth axis and the pitch axis is exactly the same, so taking the pitch axis as an example, the following steps are included:
[0030] 1) Obtain the raw data of the gyroscope, the original data is the disturbance rate data of the relative inertial space received by the platform, and record the gyroscope speed v at the current moment g(k) , v g(k) is the raw data of the gyroscope collected at time k, and the correction amount of the drift is to adjust this rate value;
[0031] 2) Use the attitude data fusion module to obtain the three-dimensional attitude information of the carrier, stabilize the moment of opening, and perform attitude fusion through gyroscope data and accel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More