

Ankle and foot orthopedic device and method for controlling same
An ankle-foot and orthopedic technology, applied in the field of ankle-foot orthopedic device and its control, can solve the problems that the ankle cannot adapt to the changes of different synchronicity, the force demand of different people, etc., and achieve the effect of high cost performance, compact structure and convenient installation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
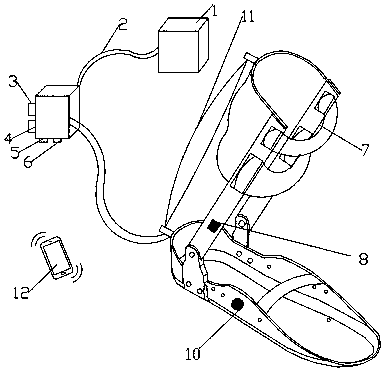
[0080]First connect one end of a trachea 2 to the air outlet of the air compressor, and the other end to the air inlet of the proportional valve 3, then use a trachea 2 to connect the air outlet of the proportional valve 3, and the other end to the pneumatic artificial muscle 11 The air inlet forms a pneumatic passage; the 24V DC output terminal of the switching power supply is connected to the positive pole of the power supply corresponding to the proportional valve 3 cable, and the ground wire is connected to the COM terminal of the switching power supply. Then connect a long enough power cord in parallel to the 24V DC output terminal of the switching power supply and connect it to the TPS5430 power conversion module. The Bluetooth module and AMS1117-3.3 module, the 3.3V DC output of the AMS1117-3.3 module is connected to the STM32 microcontroller. When the switching power supply input terminal is connected to 220V AC, the whole device is powered on.
[0081] Such as Figur...
Embodiment 2
[0085] First connect one end of a trachea 2 to the air outlet of the air compressor, and the other end to the air inlet of the proportional valve 3, then use a trachea 2 to connect the air outlet of the proportional valve 3, and the other end to the pneumatic artificial muscle 11 The air inlet forms a pneumatic passage; the 24V DC output terminal of the switching power supply is connected to the positive pole of the power supply corresponding to the proportional valve 3 cable, and the ground wire is connected to the COM terminal of the switching power supply. Then connect a long enough power cord in parallel to the 24V DC output terminal of the switching power supply and connect it to the TPS5430 power conversion module. The Bluetooth module and AMS1117-3.3 module, the 3.3V DC output of the AMS1117-3.3 module is connected to the STM32 microcontroller. When the switching power supply input terminal is connected to 220V AC, the whole device is powered on.
[0086] Such as imag...
Embodiment 3
[0090] First connect one end of a trachea 2 to the air outlet of the air compressor, and the other end to the air inlet of the proportional valve 3, then use a trachea 2 to connect the air outlet of the proportional valve 3, and the other end to the pneumatic artificial muscle 11 The air inlet forms a pneumatic passage; the 24V DC output terminal of the switching power supply is connected to the positive pole of the power supply corresponding to the proportional valve 3 cable, and the ground wire is connected to the COM terminal of the switching power supply. Then connect a long enough power cord in parallel to the 24V DC output end of the switching power supply and connect it to the power conversion module. The positive and negative 5V output of this module is connected to the sensor signal conditioning module, and then the positive 5V end of this module is divided into two channels and respectively connected to Bluetooth. Module and 3.3V step-down module, the 3.3V DC output o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More