

Human-machine cooperative control system for preventing fall of elderly person and control method thereof
A technology of control system and human-machine collaboration, applied in general control system, control/regulation system, adaptive control, etc., can solve the problems of high power consumption, poor real-time performance of control system, unnatural human-computer interaction, etc., to improve accuracy , to achieve the effect of collaborative control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In the description of the present invention, it should be noted that unless otherwise specified and limited, the terms "installation", "connection" and "connection" should be understood in a broad sense, for example, it can be a fixed connection or a detachable connection. Connected, or integrally connected; it can be mechanically connected or electrically connected; it can be directly connected or indirectly connected through an intermediary, and it can be the internal communication of two components. Those of ordinary skill in the art can understand the specific meanings of the above terms in the present invention in specific situations.
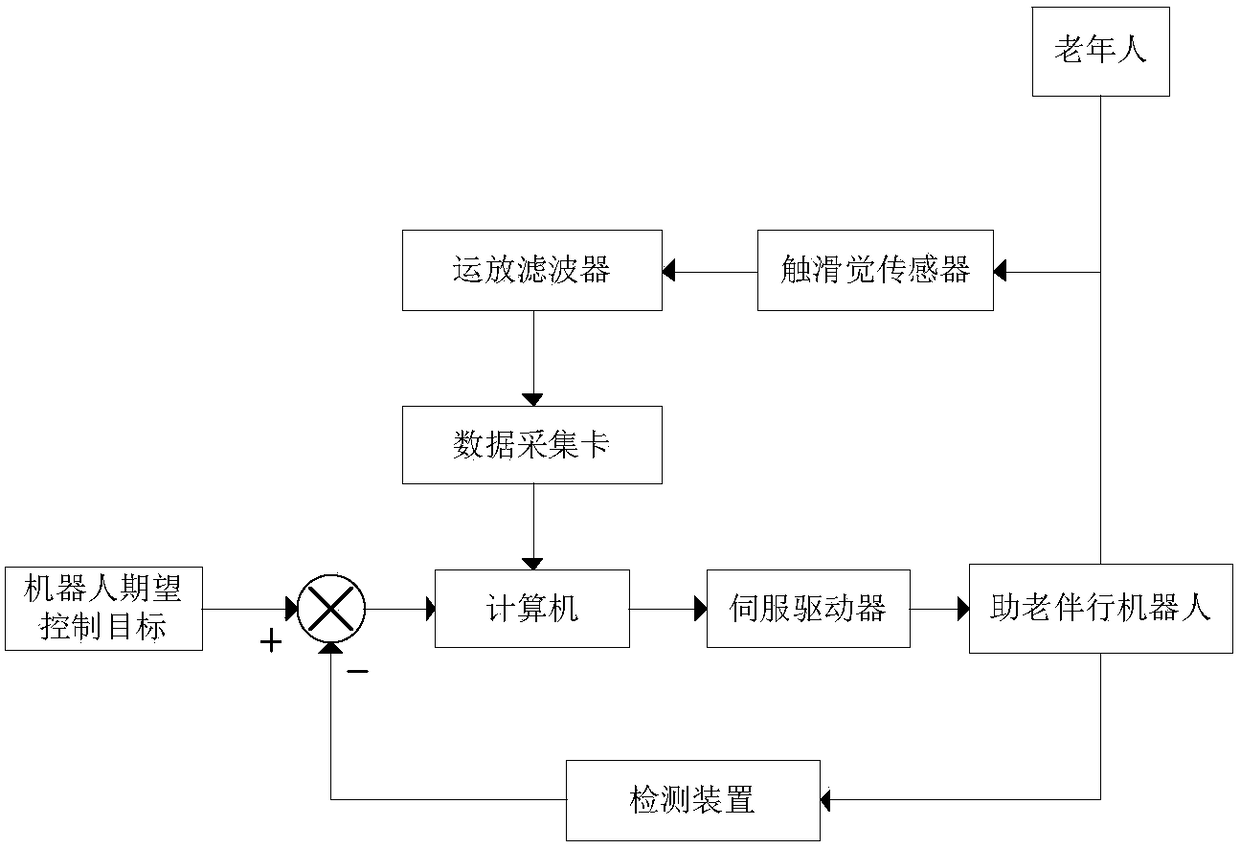
[0037] see image 3 , the present invention provides a human-machine cooperative control system for preventing the elderly from falling, including a touch-slip sensor, an operational amplifier filter, a data acquisition card, a computer, a servo driver and a corresponding detection device, and the touch-slip sensor passes through T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More