

Decoupling control method of airborne LiDAR attitude angle compensation device
A compensation device and decoupling control technology, applied in the field of decoupling control, can solve problems such as control systems that are not suitable for rapid response, complex algorithms, and large amount of calculations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
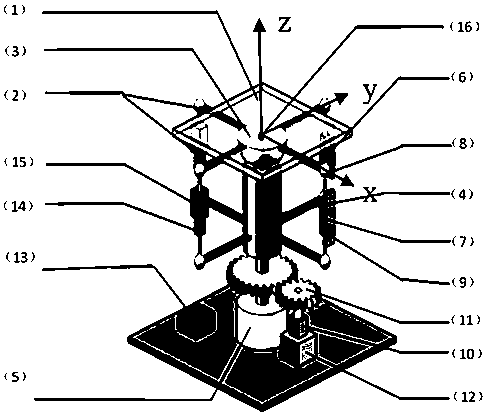
[0018] figure 1It is the mechanical structure of the airborne lidar attitude angle compensation device. The reflector (1) is supported by four mirror support rods (2) made of titanium alloy to form a cross. The magnetic small hemisphere universal bearing (3) and the column ( 4) Connection, there is a spherical concave surface on the column, so that the magnetic small hemisphere and the spherical concave surface are magnetically attracted, and the magnetic small hemisphere can flexibly rotate around the x-axis and y-axis. The z-axis adopts a vertical shaft mode, and the lower end of the column (4) is installed in the vertical rolling bearing (5). The x-axis direct motion motor (6) and the y-axis direct motion motor (7) are used to respectively drive the mirror (1) to swing up and down around the x-axis and y-axis, and the x-axis grating displacement sensor (8) and the y-axis grating displacement The sensors (9) respectively measure the actual displacements of the x-axis direc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More