

Non-contact contact network parameter detection method based on three-dimensional point cloud data
A three-dimensional point cloud, non-contact technology, applied in image data processing, instruments, calculations, etc., can solve problems such as affecting the detection effect, achieve high detection efficiency, good detection effect, and avoid detection errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
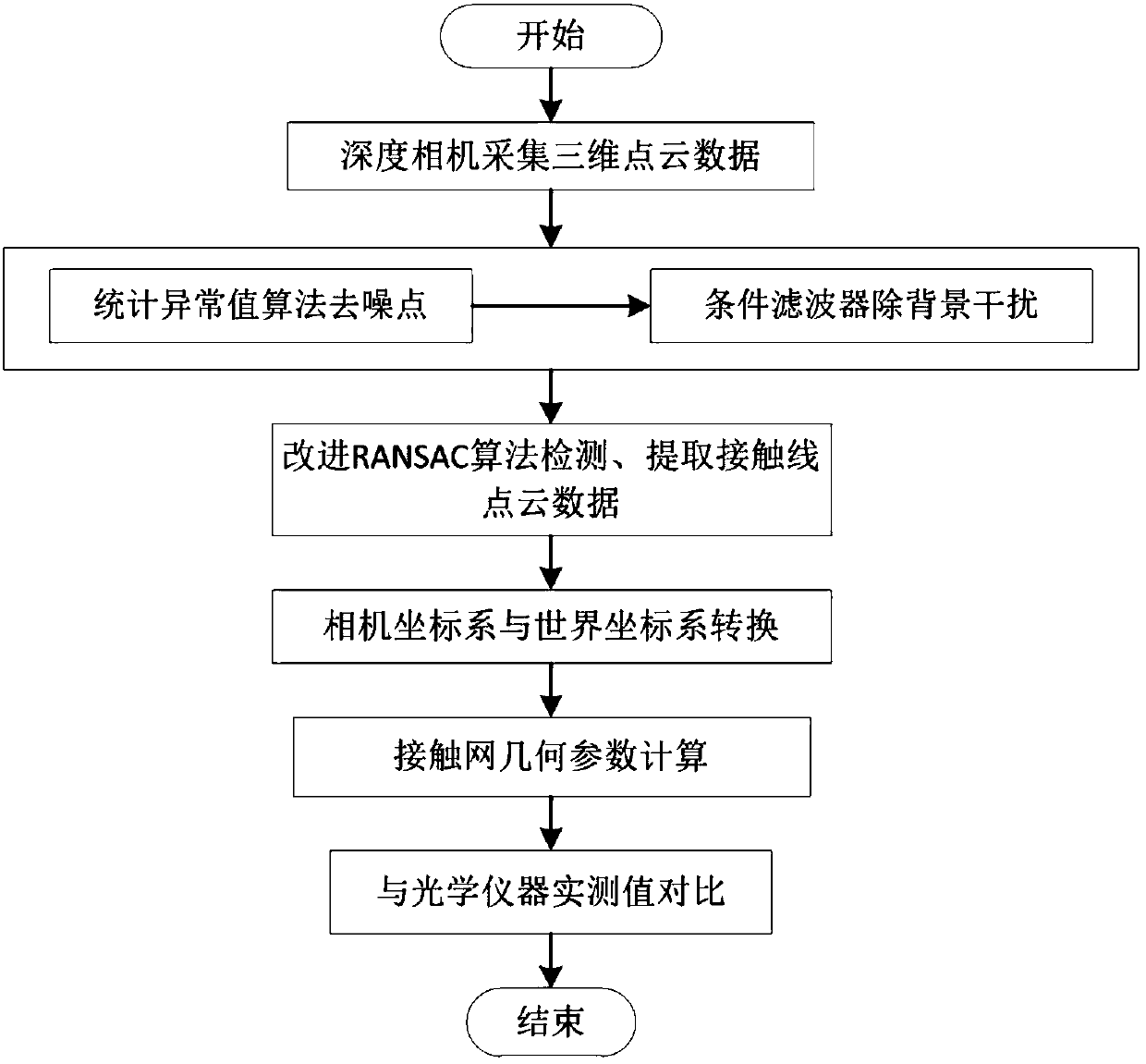
[0056] Such as figure 1 As shown, a non-contact catenary parameter detection method based on three-dimensional point cloud data, including the following steps:
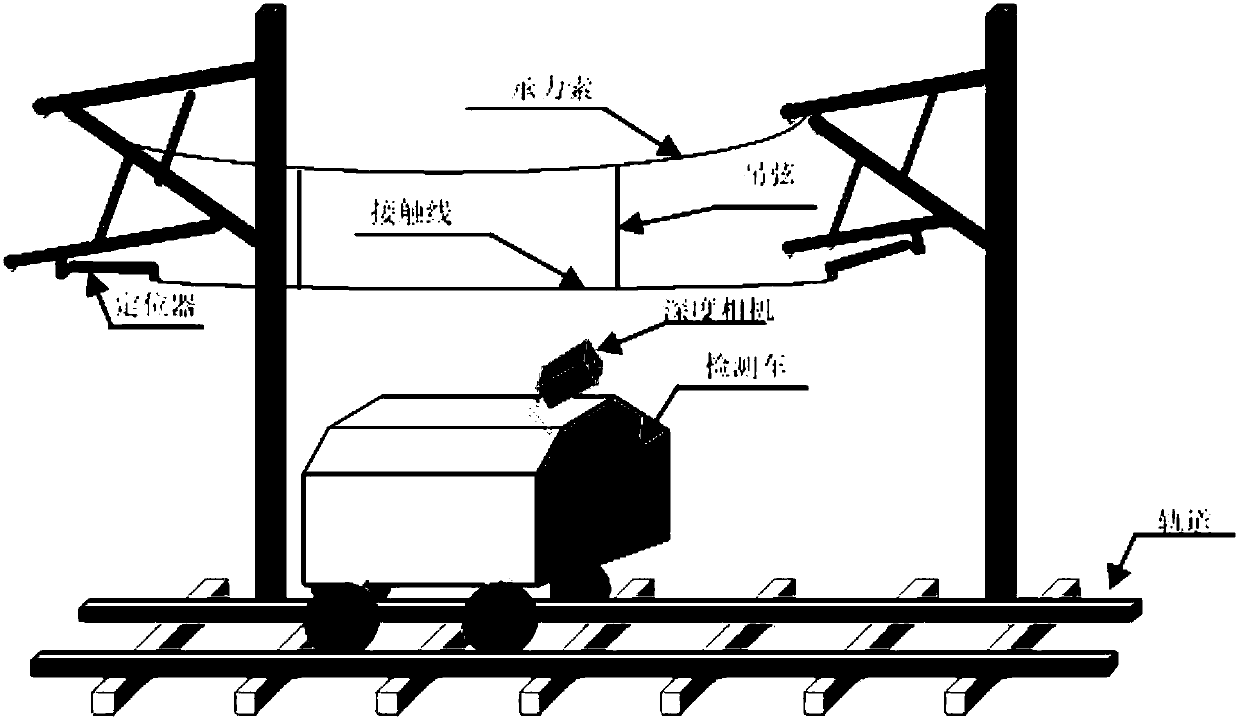
[0057] Step 1: Collect 3D point cloud data of catenary;
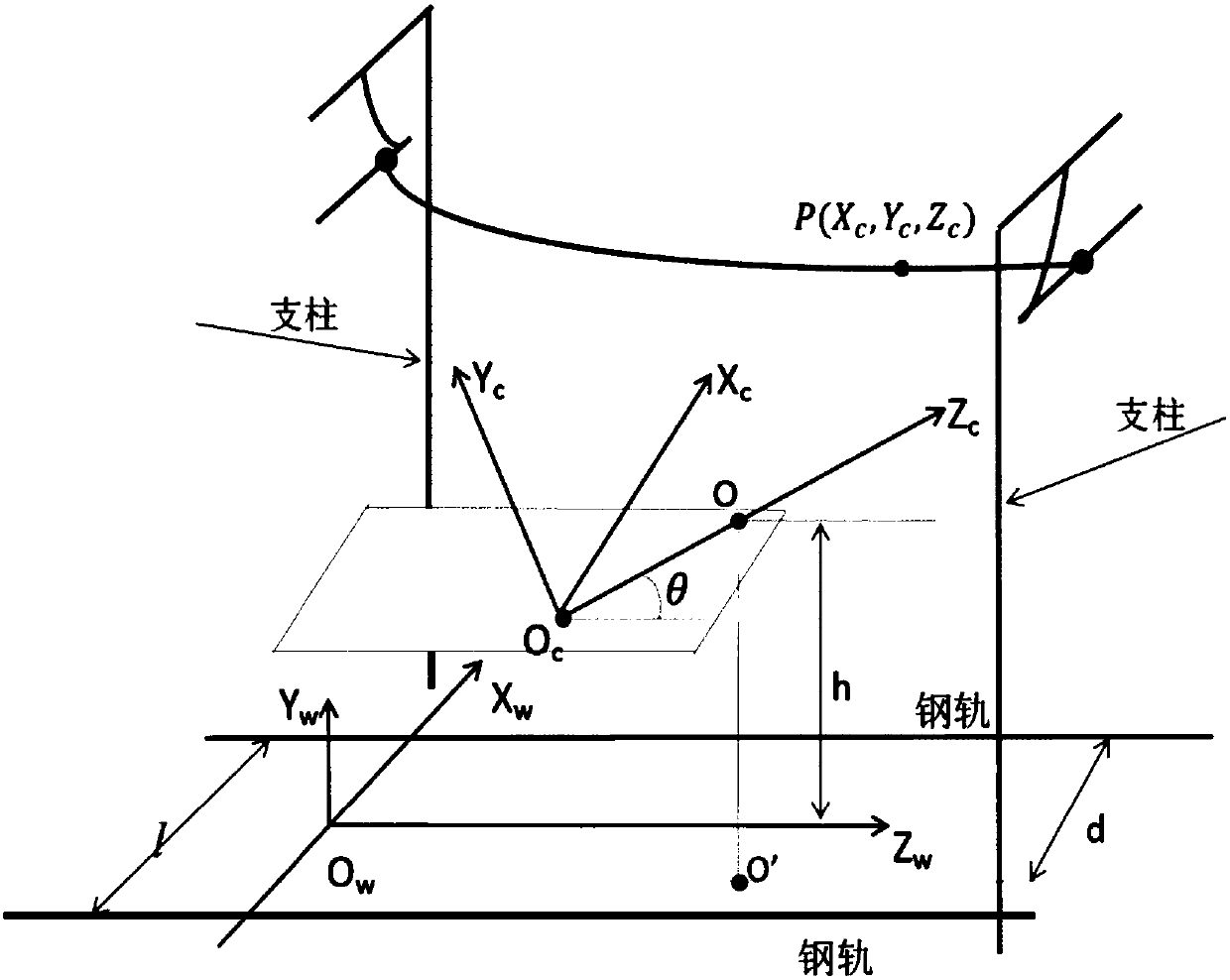
[0058] The detection device equipped with a depth camera moves along the railway track, images the support and suspension device of the high-speed railway catenary, and collects the three-dimensional point cloud data of the catenary; during the process of moving along the track, the detection device directly obtains the three-dimensional coordinate information of the target and Save it as point cloud data; the equipment single-frame acquisition data used in the embodiment of the present invention contains at most 217088 depth points; Figure 4 As shown, the left side of the figure is the 2D image of the site, and the right sid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More