Glass precise-engraving mechanical arm device and glass sheet processing method
A technology of manipulators and glass sheets, which is applied in the directions of manipulators, program-controlled manipulators, processing models, etc., can solve the problems of inability to meet the requirements of glass sheet pick-and-place, potential safety hazards, poor structural and functional stability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can understand the present invention more clearly, but the protection scope of the present invention is not limited thereby.
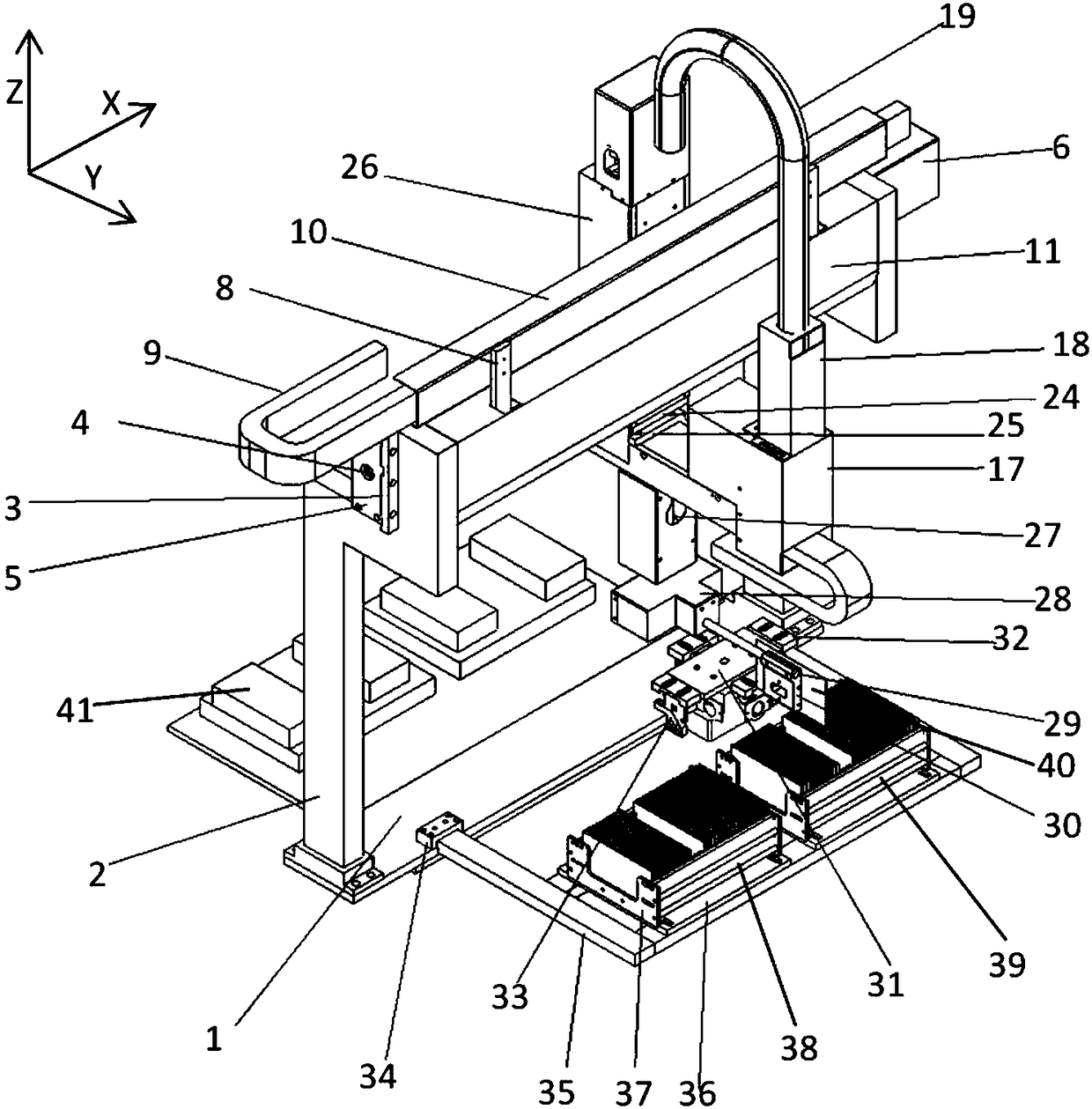
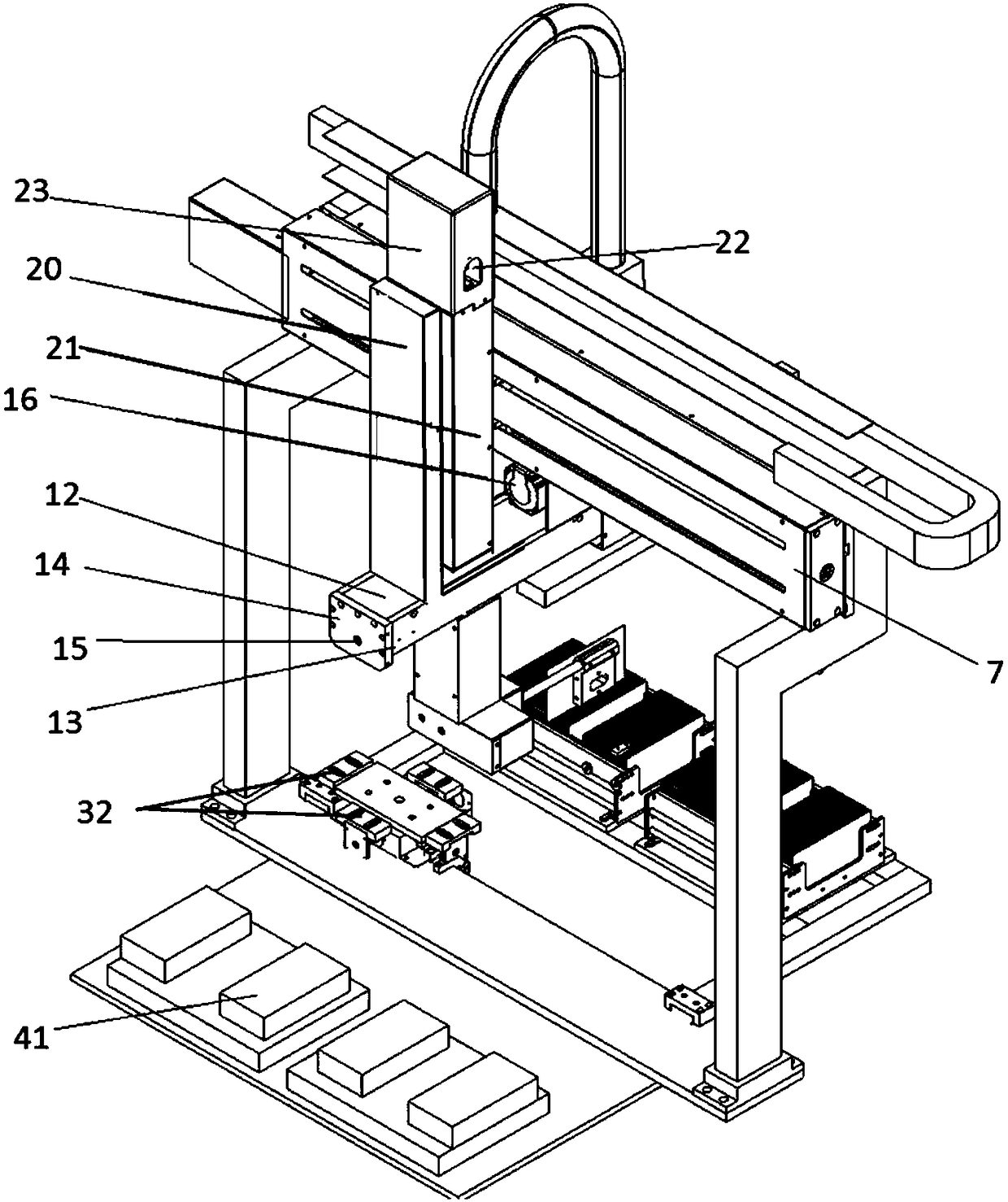
[0047] Simultaneously combined with figure 1 And attached figure 2 , which is a three-dimensional schematic diagram of the glass carving manipulator device of the present invention viewed from different angles of view. As shown in the figure, the glass carving manipulator device of the present invention includes: a supporting large base plate 1, a gantry load-bearing frame 2, and an X-axis Motion system, Y-axis motion system, Z-axis motion system, R-axis rotation system, vacuum chuck 30 , positioning system, rack system and processing carrier 41 .
[0048] The gantry load-bearing frame 2 is arranged on the support large base plate 1, the X-axis motion system is arranged on the top of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com