

Master-slave operation and man-machine integration system
An operating system and man-machine technology, applied in the field of robotics, can solve problems such as long transmission distance, achieve the effect of long transmission distance and improve operation performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
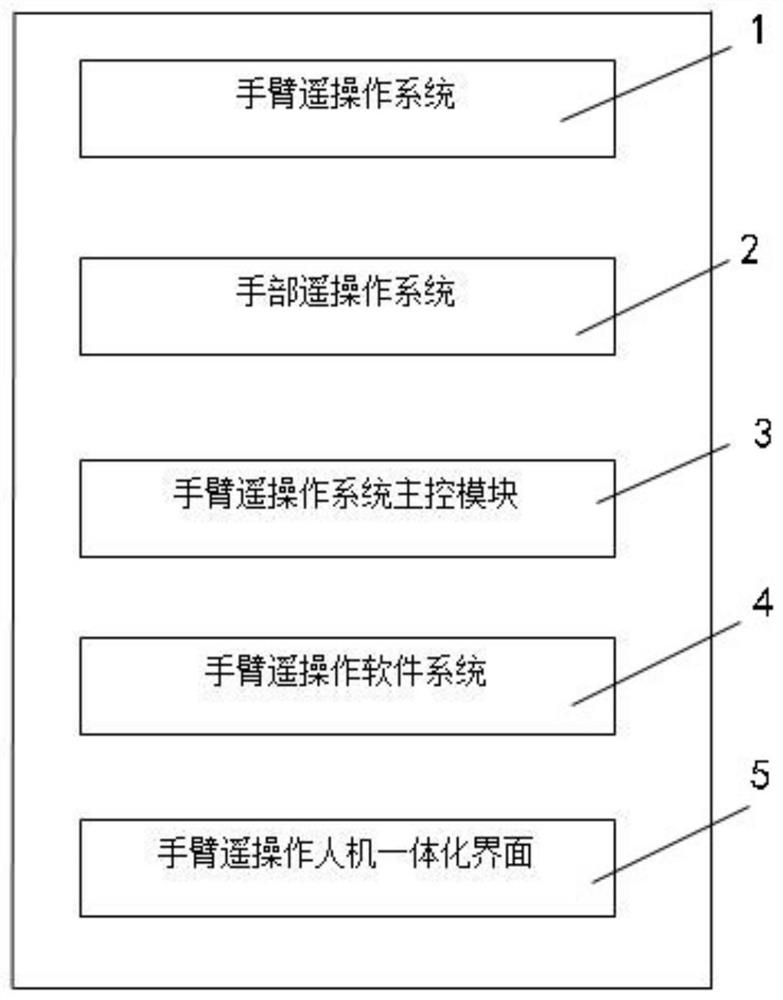
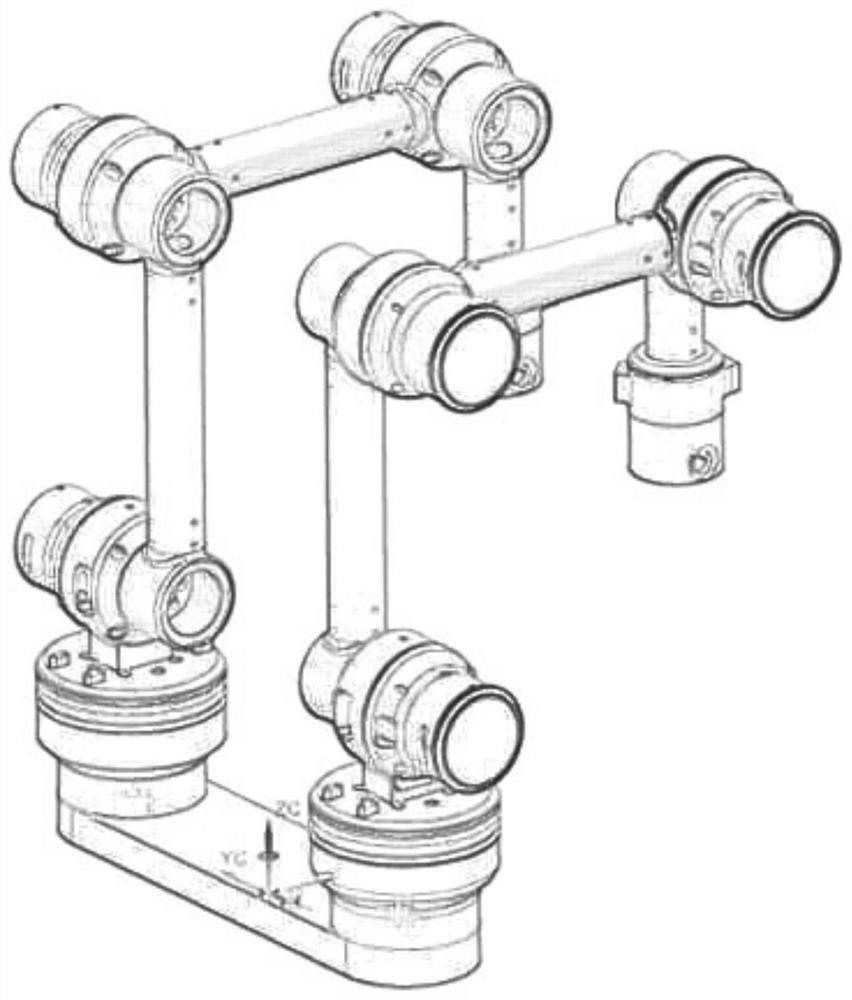
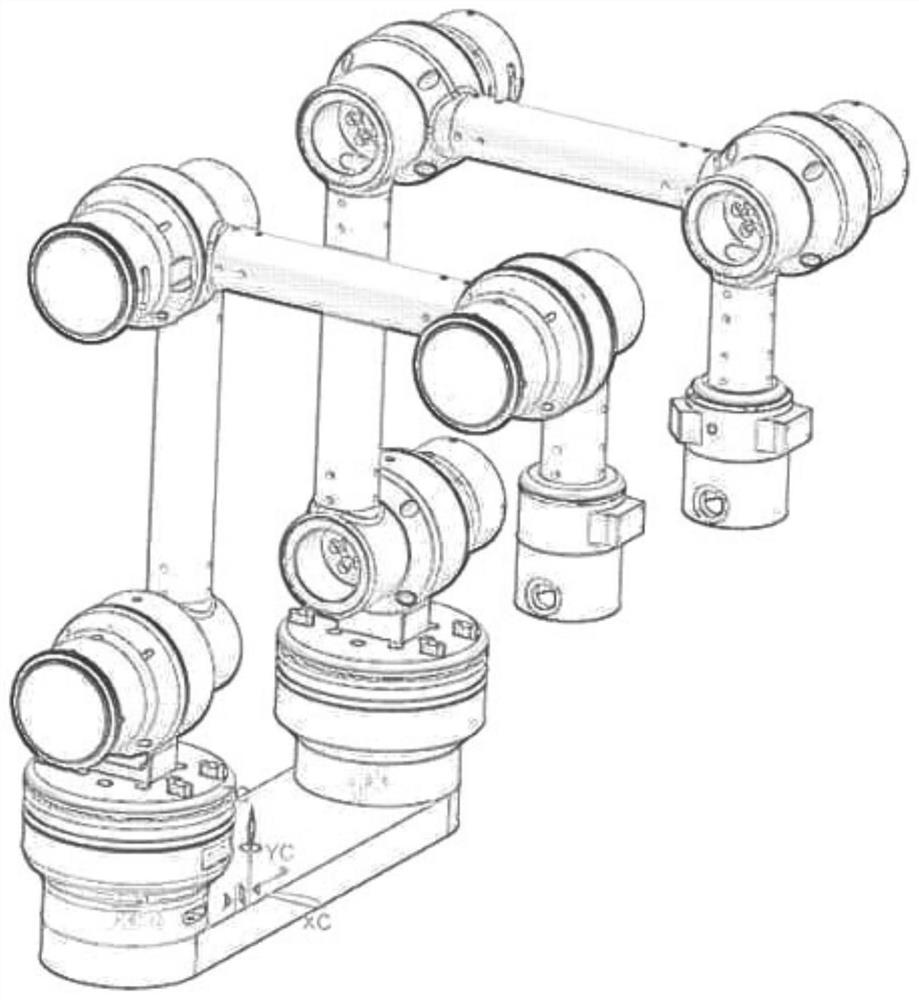
[0052] Please refer to Figure 1-Figure 3 , figure 1 It is a structural block diagram of the master-slave operation and man-machine integration system of the present invention. figure 2 It is a side structural schematic diagram of the master-slave operation and man-machine integration system of the present invention. image 3 It is another side structural schematic diagram of the master-slave operation and man-machine integration system of the present invention. A master-slave operation and human-machine integrated operating system, the master-slave operation and man-machine integrated system includes arm remote operating system 1, hand remote operating system 2, arm remote operating system main control module 3, arm remote operating system Operating software system 4, arm remote operation man-machine integrated interface 5.
[0053] The arm teleoperating system 1 includes an operator, a master robot subsystem, a communication link, a slave robot subsystem and a working en...
Embodiment 2
[0069] This embodiment is basically the same as Embodiment 1, and the difference is that a dual-arm robot control model is provided in this embodiment; the dual-arm robot control model includes a command layer (mainly including a command generator), a local Control layer (mainly including local controller), network layer (two-way communication between master and slave), remote control layer (mainly including remote controller) and physical layer (robot system); locally, the command generator transmits commands to the local The controller, the local controller takes the clock Clock1 as the cycle, samples the commands generated by the command generator and the status of the remote robot transmitted through the network, generates control commands and sends them to the remote controller through the network; the remote controller takes the clock Clock2 as the cycle , sample the control command of the local controller and send the state of the robot to the local controller through th...
Embodiment 3
[0071] This embodiment is basically the same as Embodiment 1, except that this embodiment provides a delay control method for operating a robot, using a 433MH wireless data transmission system with a delay rate of 100 milliseconds.
[0072] What needs to be explained in this embodiment is:
[0073]In the teleoperation robot system, the master end and the slave end are far apart, and the two rely on the communication link for information transmission. Due to the limitations of the transmission speed of electromagnetic waves and signal sending and receiving processing, there is a time delay in the teleoperation robot system, and it is often large and cannot be ignored. For example, in the field of space teleoperation, the average space-to-ground delay is less than 3 seconds, the probability of the delay time being within 5 seconds is greater than 95%, and the average jitter is between 0.357ms and 20.45ms. In addition to the delay caused by the distance, the compression / reproduc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More