

An autonomous humanoid dual-arm robot and its operating system for tracking moving targets
A moving target and operating system technology, applied in the field of autonomous humanoid dual-arm robots and their tracking operating systems for moving targets, can solve problems such as the disaster of dimensionality, achieve flexibility, reduce detection interference, and have a wide range of efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
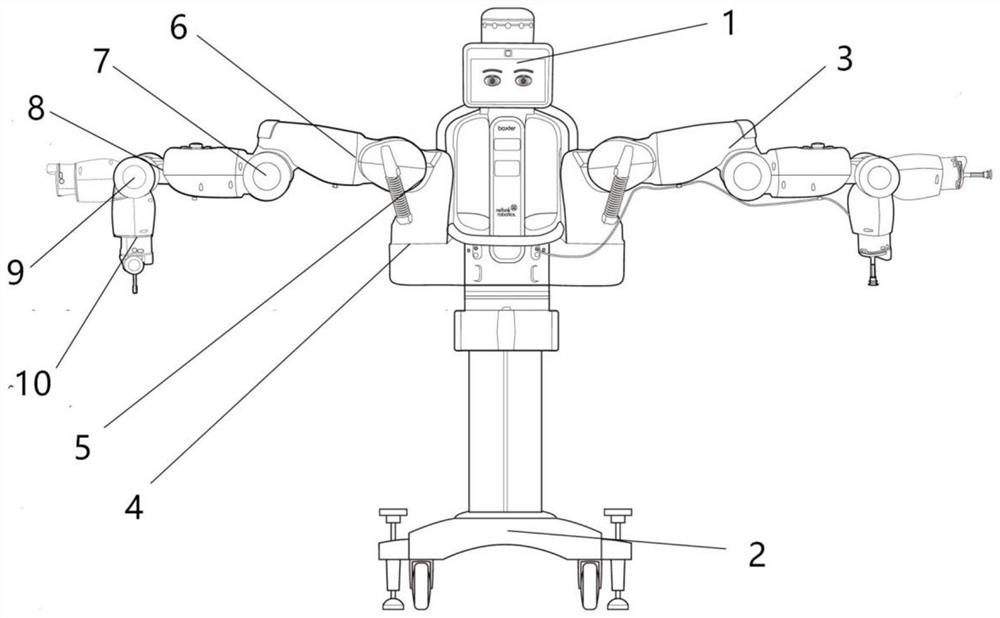
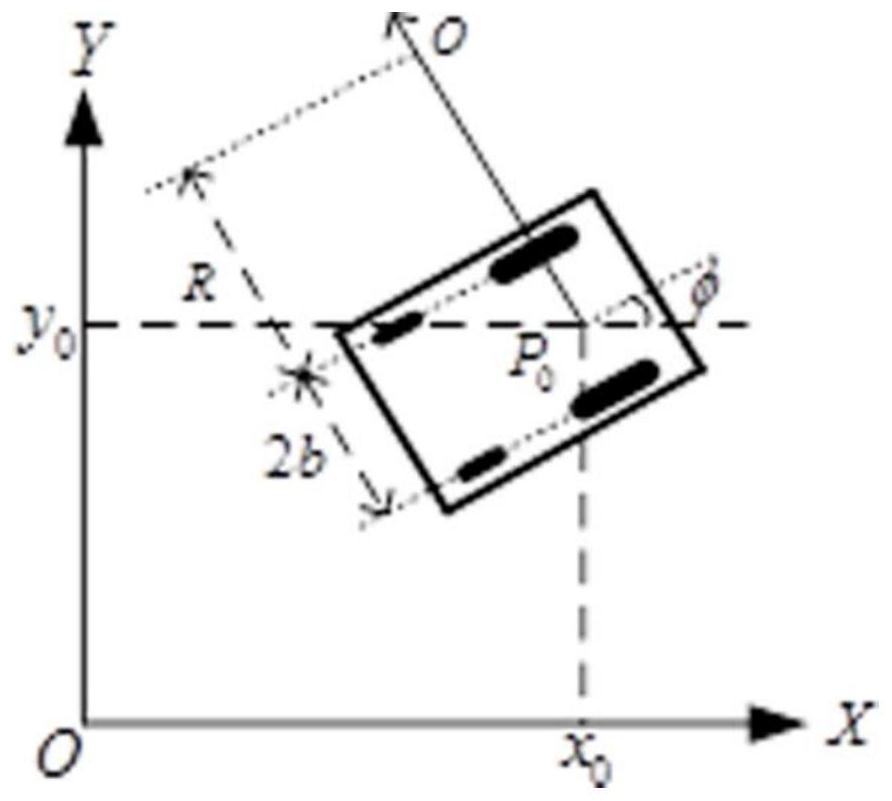
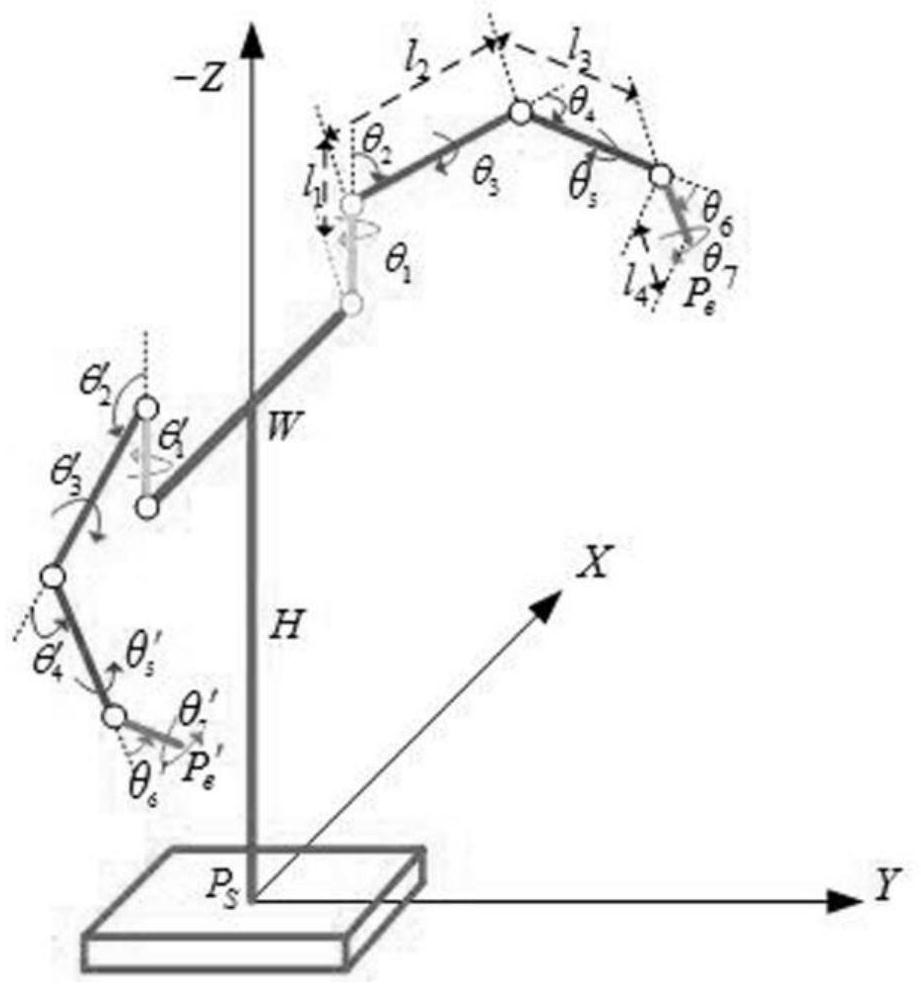
[0082] Combine below Figure 1-9 The present invention is further described, but the protection scope of the present invention is not limited to the content.
[0083] Wherein the same parts are denoted by the same reference numerals. It should be noted that the words "front", "rear", "left", "right", "upper" and "lower" used in the following description refer to the directions in the drawings, and the words "inner" and "outer" ” refer to directions toward or away from the geometric center of a particular component, respectively, and the drawings are in very simplified form and in imprecise ratios, only for the purpose of assisting in explaining embodiments of the present invention for convenience and clarity.
[0084] In the interest of clarity, not all features of an actual embodiment are described, and in the following description, well-known functions and constructions are not described in detail since they would obscure the invention with unnecessary detail and should be c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More