

SLAM system based on multi-view panoramic inertia navigation
A panorama and panorama image technology, applied in image data processing, instrumentation, calculation, etc., can solve problems such as large influence of scale estimation, limited and insufficient field of view, improve accuracy and robustness, realize deviceization, The effect of ensuring sufficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
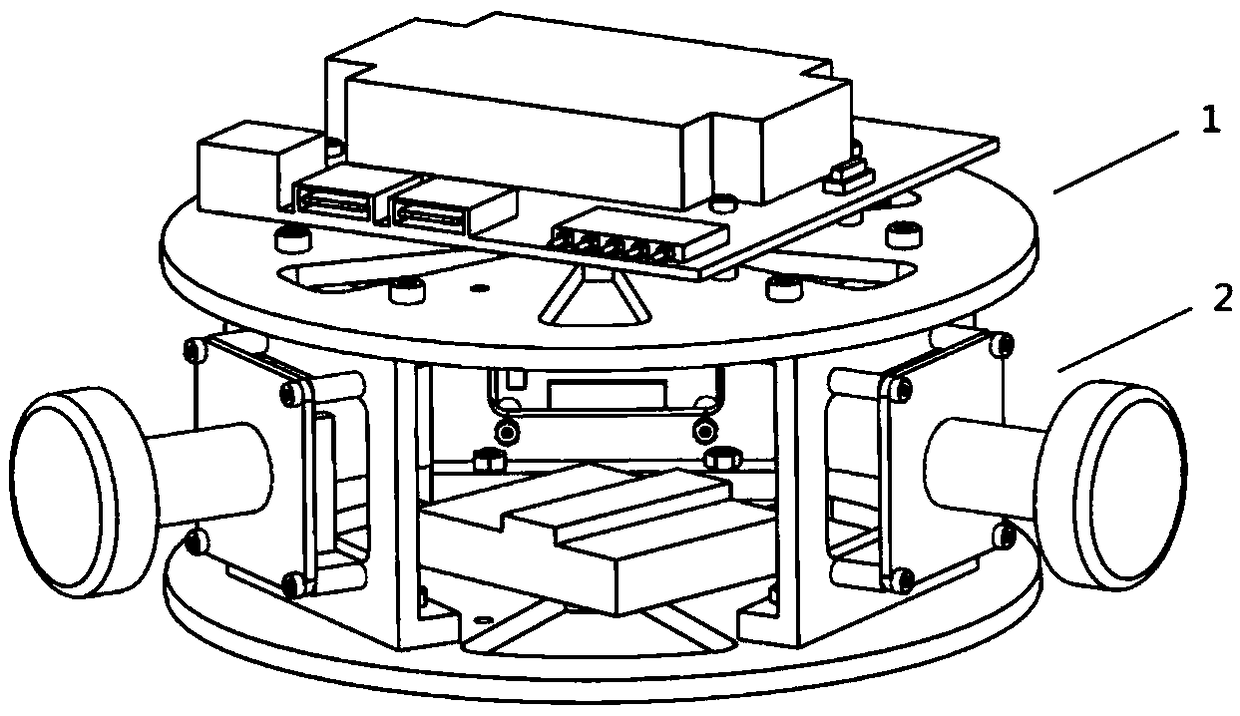
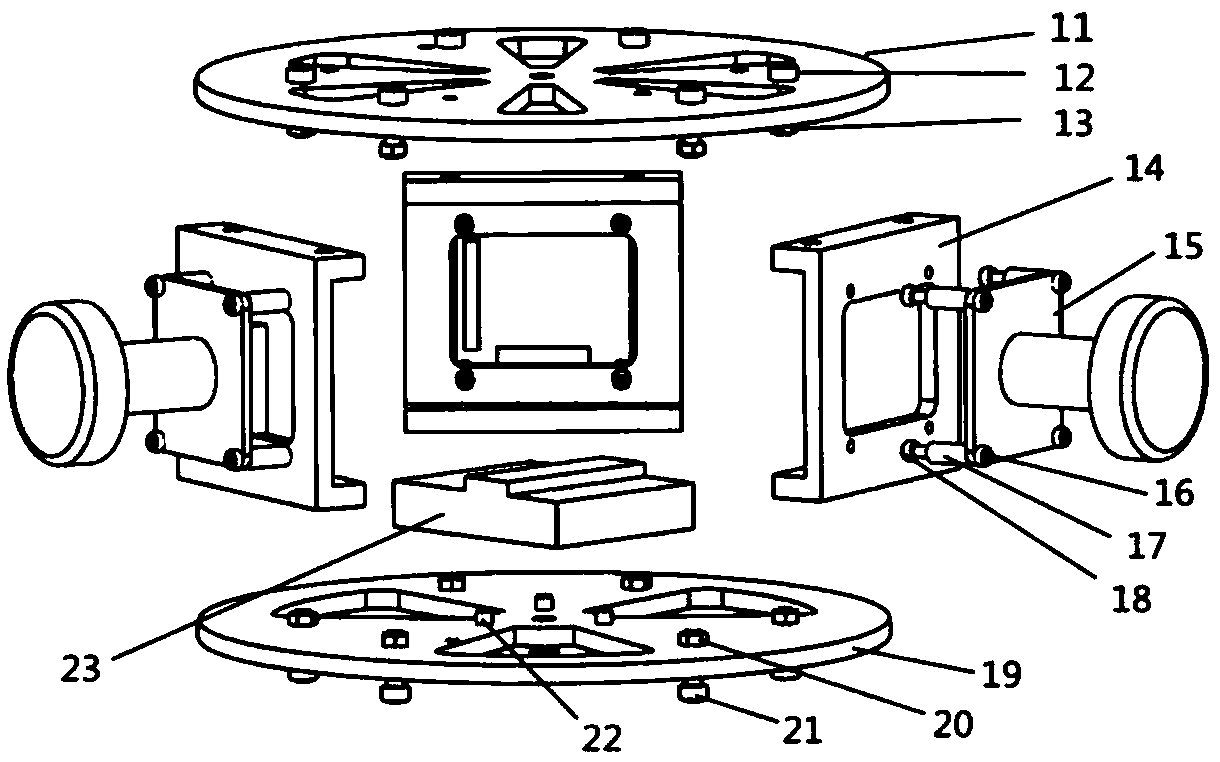
[0027] This embodiment provides a SLAM system based on panoramic inertial navigation, please refer to figure 1 , which is a schematic diagram of the structure of the trinocular panoramic inertial navigation SLAM system. Such as figure 1 Described, described trinocular panoramic inertial navigation SLAM system comprises embedded heterogeneous computing module 1, information collection module 2 and SLAM processing module (referring to Figure 4 ).
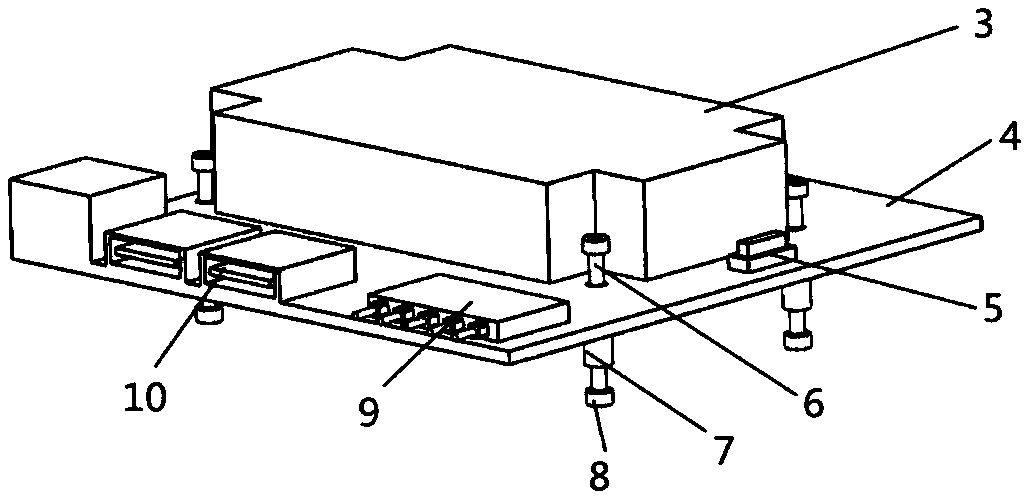
[0028] The embedded heterogeneous computing module 1 is used to control the hardware trigger circuit and SLAM algorithm acquisition and calculation. The embedded heterogeneous computing module such as figure 2As shown, it mainly includes a core processing module 3 , a function expansion carrier board 4 , a control switch 5 , a synchronous trigger hardware circuit 9 and an information input port 10 . The core processing module and function expansion carrier board meet the embedded heterogeneous mode and support ARM / GPU / DSP / FPGA i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More