Robot end actuator used for picking clustered tomatoes
An end effector and robot technology, applied in the field of automation, can solve the problems of prolonging the decision-making process and path planning time of the robot, high cost of manual harvesting, and reducing the efficiency of the robot picking operation, so as to shorten the decision-making process and path planning time, improve the The success rate of fruit stem separation and the effect of improving the efficiency of picking operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings and examples.
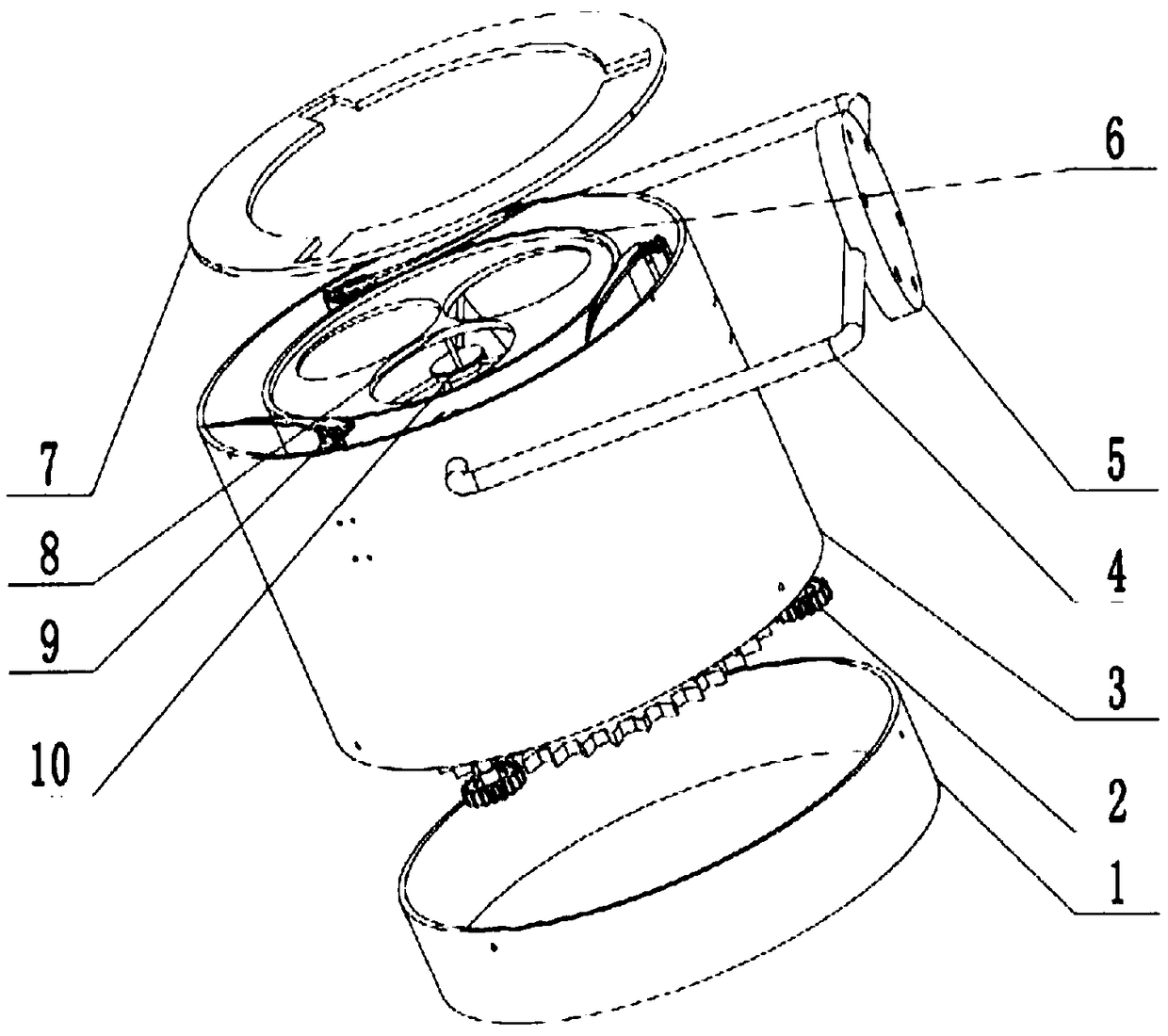
[0025] Such as figure 1 As shown, a robot end effector for cluster tomato picking mainly includes an outer cylinder 3, an inner cylinder 6, a cluster fruit collection mechanism 10, a fruit release mechanism 4 and three fruit stem rotary cutting mechanisms 9, wherein :
[0026] The inner cylinder 6 is fixed inside the outer cylinder 3 by screws, the two are coaxial, and the bottom of the outer cylinder 3 is fixed with a lower end cover 1 by screws, and the lower end cover 1 is used to protect the gear set 2 from external corrosion. There is a cylindrical shaft 6-2 in the center of the inner cylinder 6; the upper side of the inner wall of the outer cylinder 3 is fixed with an annular baffle 7 by screws, and the baffle 7 is used to prevent external debris from entering the outer cylinder 3 to protect the fruit stem Rotary cutting mechanism ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com