

Target motion parameter estimation method for random frequency hopping radar
A motion parameter and target technology, which is applied in radio wave reflection/re-radiation, climate sustainability, instruments, etc., can solve the problems of signal sparsity, poor anti-noise performance, low robustness, and large amount of calculation. Achieve the effects of large unambiguous range of speed measurement, short coherent accumulation time and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
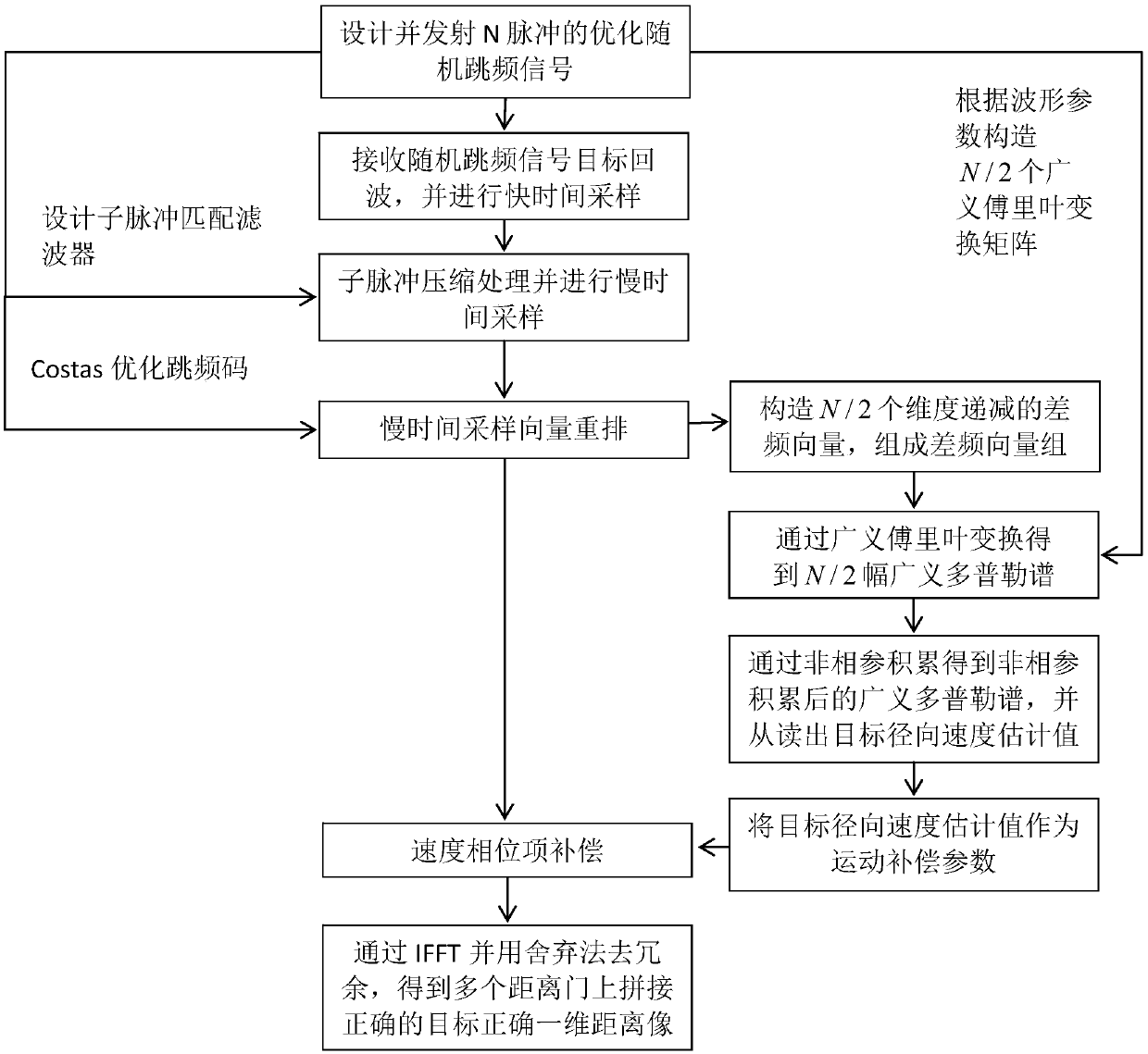
[0036]The Doppler sensitivity of the random frequency hopping signal makes the radial velocity of the target must be measured as the motion compensation parameter before the random frequency hopping radar performs range dimension processing on the target echo, which makes the target motion parameter estimation in the random frequency hopping radar particularly important. important. Considering that the existing multi-group random frequency hopping signal motion parameter estimation requires too long accumulation time, and the single group random frequency hopping signal motion parameter estimation method has a large amount of calculation and poor anti-noise performance, the present invention provides a single group random frequency hopping signal motion parameter estimation method. The method of random frequency hopping to complete the target speed measurement has the advantages of short coherent accumulation time, small calculation amount and good anti-noise performance.
[0...
Embodiment 2
[0053] The target motion parameter estimation method of random frequency hopping radar is the same as embodiment 1, the slow time sampling vector preprocessing described in step 3, the slow time sampling vector S=[s obtained by step 2 0 ,s 1 ,s2 ,...,s N-1 Each element in ] is the single-point sampling value of each sub-pulse with different frequencies, and each element in S is sorted according to the emission time of each element corresponding to the sub-pulse. Here, the elements in the vector S are first sorted by sub-pulse The transmission frequency is reordered from small to large, and the 1×N-dimensional slow time sampling vector S' rearranged according to frequency is obtained, and S'=[s 0 ',s 1 ',s 2 ',...,s N-1 '], the N-point optimized frequency-hopping code vector L designed in step 1 contains the frequency information of the sub-pulse corresponding to each element in the slow-time sampling vector S, and L=[l 0 , l 1 , l 2 ,...,l N-1 ],have:
[0054] S'(l k...
Embodiment 3
[0058] The target motion parameter estimation method of random frequency hopping radar is the same as embodiment 1-2, and the structure difference frequency vector group described in step 4 includes the following steps:
[0059] (4a) Select the number of beat frequency vectors to be constructed and set the frequency difference corresponding to each beat frequency vector: consider setting the possible value of the frequency difference between N sub-pulses as mΔf, m=1,2,3,... .,N-1, take the former in mΔf composed of Dimensional difference frequency value vector Df, set to have:
[0060] df i = iΔf
[0061] in, Δf is the frequency step in the waveform parameters; then construct difference frequency vectors, let the ith difference frequency vector be E i , then its corresponding frequency difference is df i ,
[0062] (4b) The difference frequency vector is obtained by conjugate multiplication: each element of the slow time sampling signal S' rearranged according ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More