

Monocular camera pose measurement device and method based on iterative updating
A pose measurement and iterative update technology, applied in image data processing, instruments, calculations, etc., can solve the problems of poor robustness of the pose measurement system, iteration non-convergence, data deterioration, etc., to achieve convenient calculation and simplified measurement accuracy calibration The effect of the process and the small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
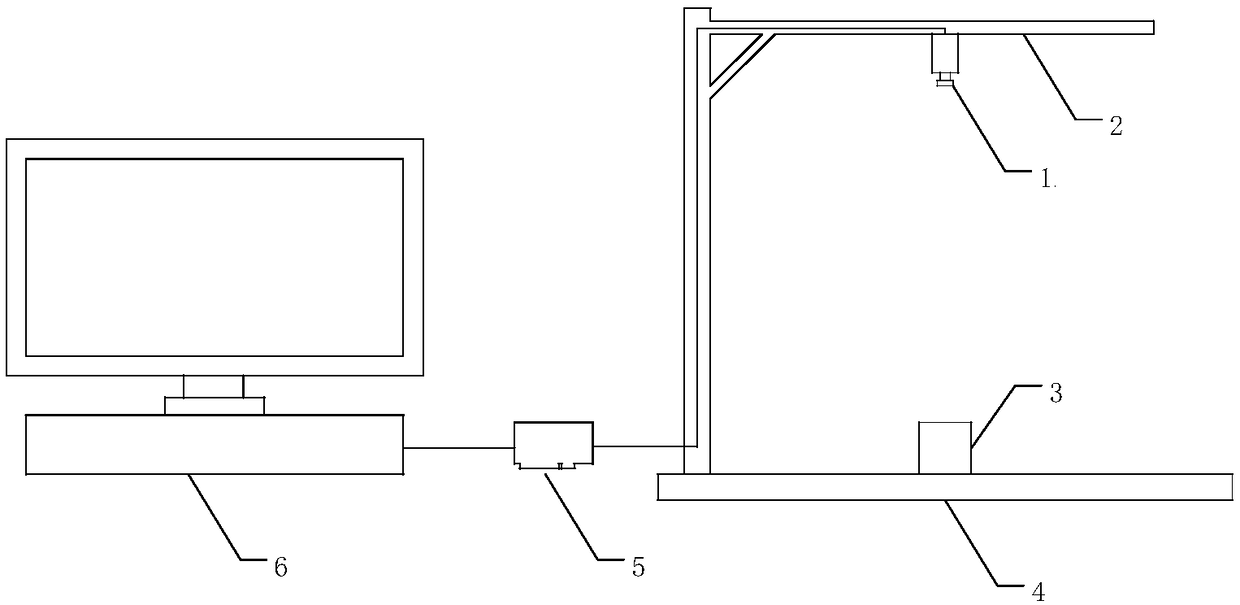
[0019] Embodiment one: if figure 1 As shown, the monocular camera pose measurement device based on iterative update involved in this embodiment includes an industrial camera, a camera bracket, a target to be measured, a motion platform, an image acquisition card, and a pose measurement industrial computer, the camera bracket and the industrial camera Fixed connection, the industrial camera is placed above the target to be measured, and the target to be measured performs two-dimensional translation and one-dimensional rotation on the motion platform, the signal output end of the industrial camera is connected to the signal input end of the image acquisition card, and the image acquisition card The output end is connected with the input end of the pose measurement industrial computer.
[0020] The camera bracket is fixedly connected with the industrial camera and is used to fix and support the industrial camera. The target to be measured performs two-dimensional translation and...
Embodiment 2
[0021] Embodiment two: if figure 1 As shown, the iterative update-based monocular camera pose measurement method involved in this embodiment, the specific steps of the iterative update-based monocular camera pose measurement method are:
[0022] Step 1: First, deduce the three-dimensional world coordinates from the two-dimensional measurement data extracted from the measurement image;
[0023] Step 2: Realize the pose measurement of the target to be measured through iterative update of the pose.
[0024] The homogeneous coordinates in the image coordinate system are
[0025]
[0026] The homogeneous coordinates in the normalized coordinate system are
[0027]
[0028] The internal parameter matrix obtained by camera calibration is
[0029]
[0030] According to the pinhole imaging model of the camera, it can be obtained
[0031]
[0032] According to the knowledge of linear algebra, it can be obtained that the internal parameter matrix of the camera is an inver...
Embodiment 3
[0069] Embodiment three: as figure 1 As shown, in the monocular camera pose measurement method based on iterative update involved in this embodiment, the specific steps for realizing the pose measurement of the target to be measured through iterative update of the pose are: the first step is to measure the target The initial pose is determined, and the second step is to iteratively update the pose of the target to be measured.
[0070] initial time t 0 Corresponding object coordinate system S 0 The coordinates of the origin O of the coordinates in the world coordinate system are shown in formula (20)
[0071]
[0072] In order to solve It is necessary to rotate the target to be measured 3 times around its rotation axis, and record the world coordinates of the marker point A after each rotation, which are denoted as
[0073]
[0074]
[0075]
[0076] From the fixed connection between the marker point A and the target to be measured, it can be seen that the dis...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More