

Duct type multi-rotor tethered drone and control system thereof
A technology of drones and multi-rotors, which is applied to rotorcraft, ground devices for mooring aircraft, motor vehicles, etc., and can solve problems such as short battery life of drones, easy crashes, and exposed rotors of drones , to achieve low aerodynamic noise, long flight time, and improved aerodynamic lift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
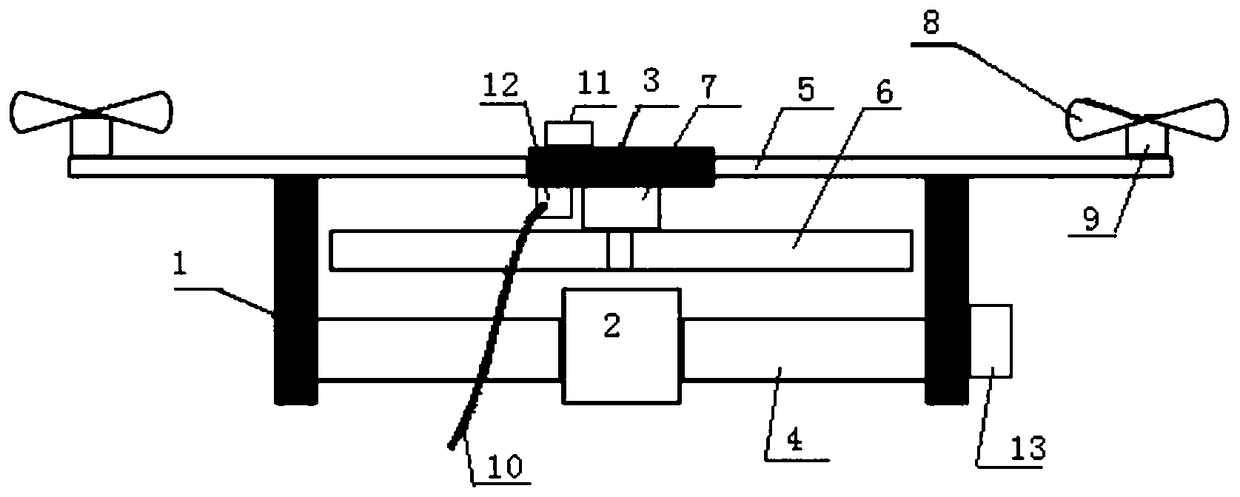
[0025] A ducted multi-rotor tethered UAV in this embodiment comprises a ducted tube 1, a central tube 2, a set of central plates 3, a set of deflectors 4, a set of carbon fiber tubes 5, a main rotor 6. Main motor 7, 80A ESC, a group of auxiliary rotors 8, a group of auxiliary motors 9, a group of 30A ESC, tethered cables 10, hardware control system 11, power supply system 12, video acquisition unit 13 and for The remote control UAV autopilot 14, the external duct pipe 1 and the internal central pipe 2 are coaxially arranged, the central pipe 2 and the duct pipe 1 are connected by a set of deflectors 4, and a set of central plates 3 Concentric stacking forms a central plate body, a group of carbon fiber tubes 5 are fixedly installed on the side outer wall of the central plate body, and the carbon fiber tubes 5 are evenly distributed in the circumferential direction of the side outer wall of the central plate body, and the central plate body is the same as the duct pipe 1 The ax...
specific Embodiment approach 2
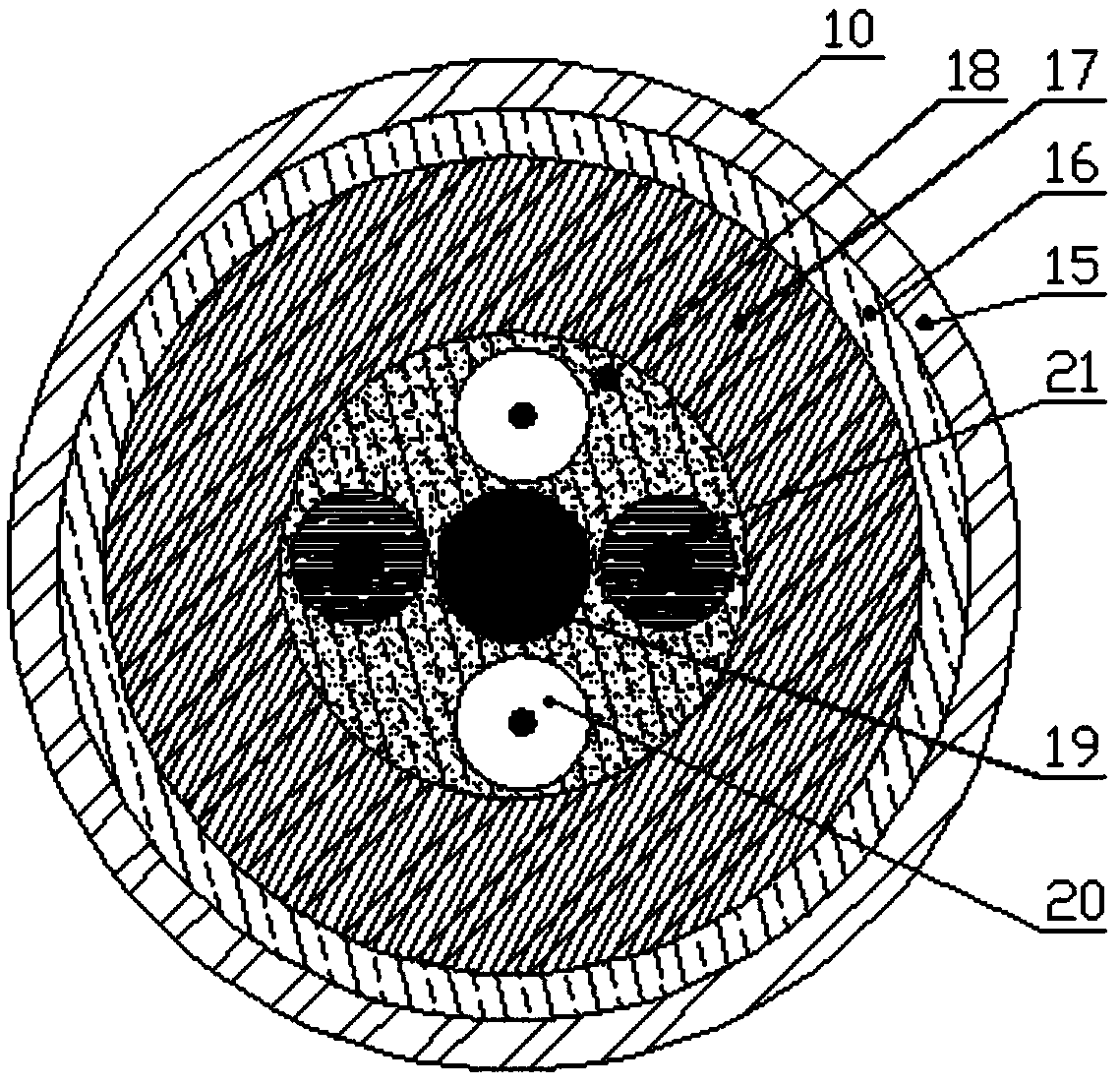
[0029]The difference from Embodiment 1 is that in the ducted multi-rotor tethered UAV of this embodiment, the cross-section of the tethered cable 10 is the outer casing layer 15 and the ground wire from the outer layer to the inner layer. Mesh layer 16, strength material layer 17, high-voltage insulation layer 18, 1 load-bearing cable 19, 2 communication optical fibers 20 and 2 power lines 21 are arranged in the high-voltage insulation layer 18, and the load-bearing cable 19 is located in the middle, and is arranged around Two communication optical fibers 20 and two power lines 21 are arranged alternately between the communication optical fibers 20 and the power lines 21 .
specific Embodiment approach 3
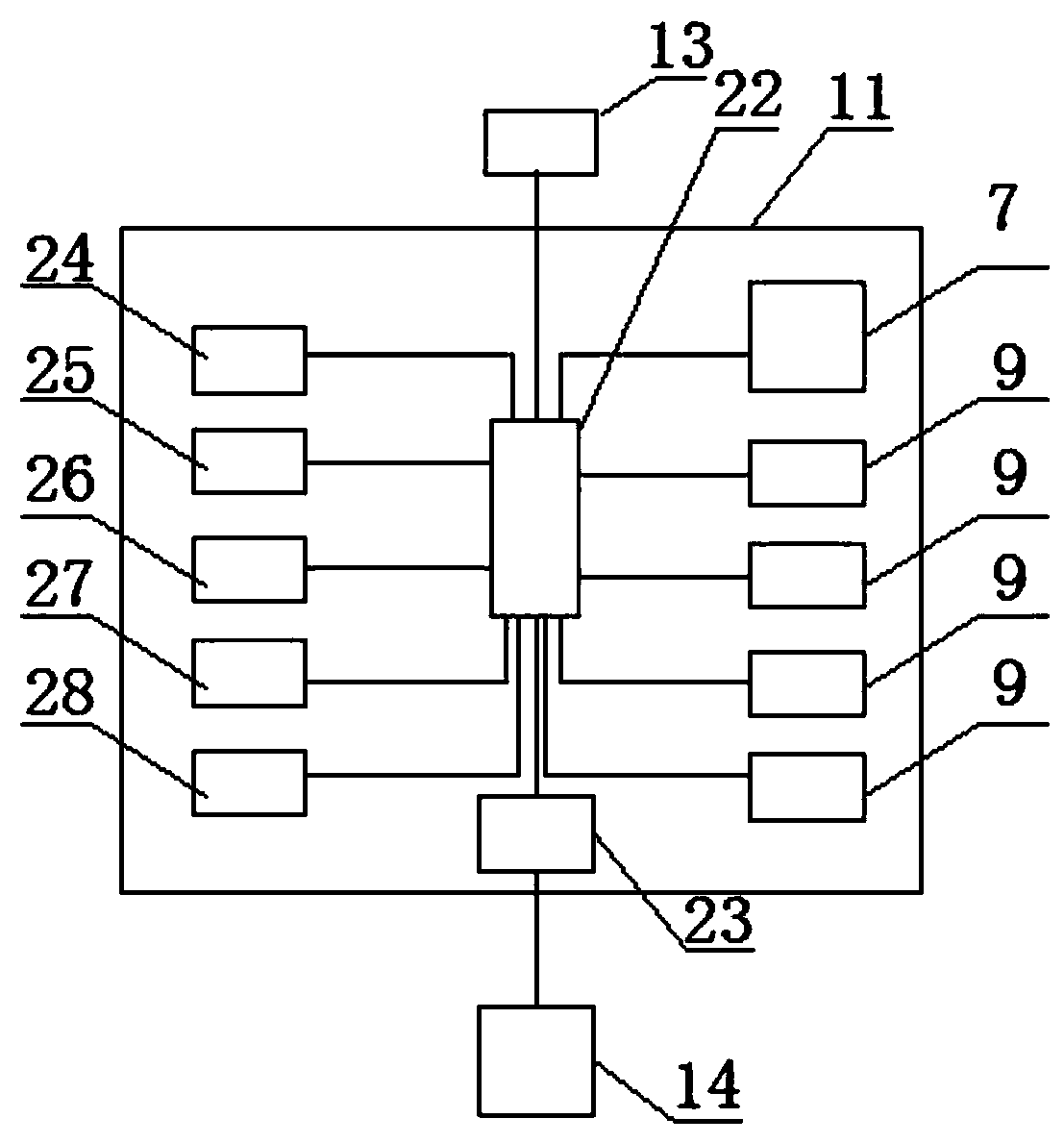
[0030] The difference from Embodiment 1 or Embodiment 2 is that in the ducted multi-rotor tethered drone of this embodiment, the hardware control system 11 includes a flight controller 22, a data transmission unit 23, a voltage and current sensor 24, a GPS Receiver 25, airspeed sensor 26, ultrasonic ranging sensor 27 and remote control receiver 28, flight controller 22 internally integrates accelerometer, gyroscope, magnetometer and barometer, and the interface of flight controller 22 is connected with voltage and current sensor 24 , GPS receiver 25, airspeed sensor 26, ultrasonic ranging sensor 27, remote control receiver 28, flight controller 22 connects autopilot 14 by data transmission unit 23, flight controller 22 connects video acquisition unit 13, main motor 7 And one group of auxiliary motor 9. The model of the flight controller 22 is PIXHAWK, a 32-bit ARM chip processor; the data transmission unit 23 adopts a wired or wireless form.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More