A surgical instrument calibration system and method for navigating surgery
A surgical instrument and calibration system technology, applied in surgical navigation systems, surgery, applications, etc., can solve the problems of increasing the uncertainty factors of calibration failure, time-consuming, labor-intensive, expensive, etc., to reduce the risk of calibration failure, reduce The number of times to capture images, and the effect of improving accuracy and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
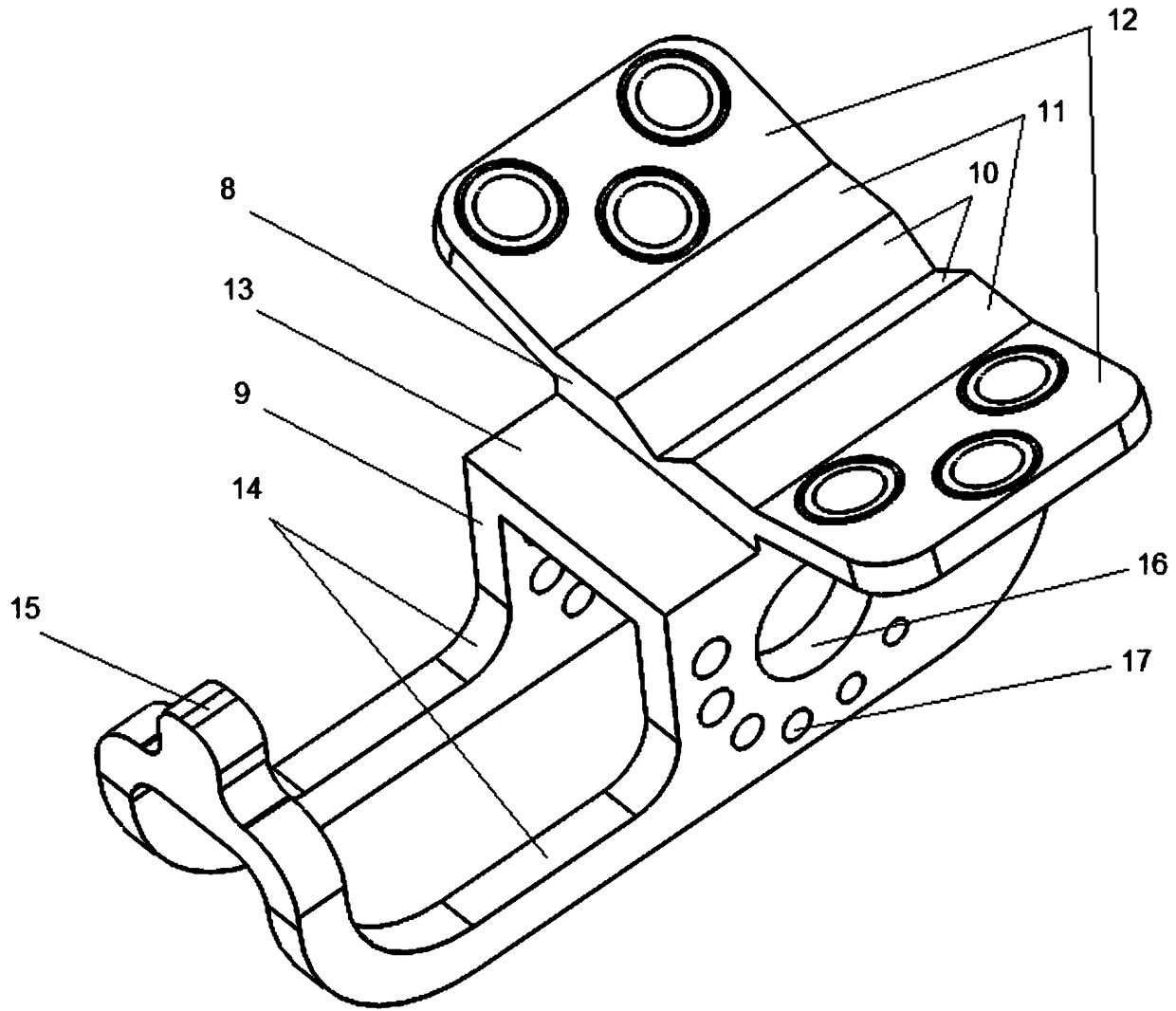
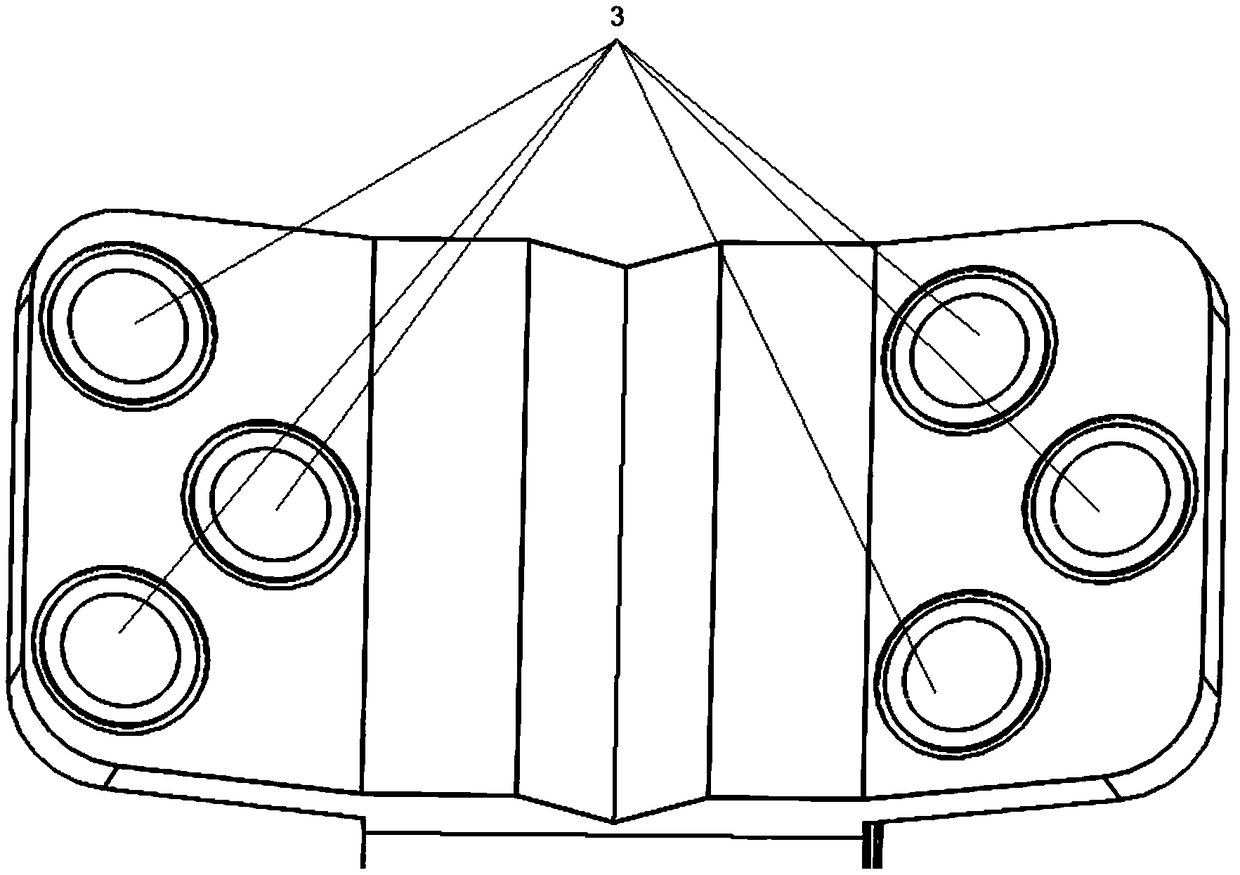
[0039] The core of the present invention is to provide a surgical instrument calibration system for navigation surgery, which has a simple structure and is easy to manufacture, and can be used to efficiently and accurately complete the calibration of navigation surgical instruments. Another core of the present invention is to provide a surgical instrument calibration method using the surgical instrument calibration system, which can greatly improve the efficiency and accuracy of surgical instrument calibration, reduce the complexity of calibration, simplify the calibration process, and save intraoperative navigation preparations time.
[0040] In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
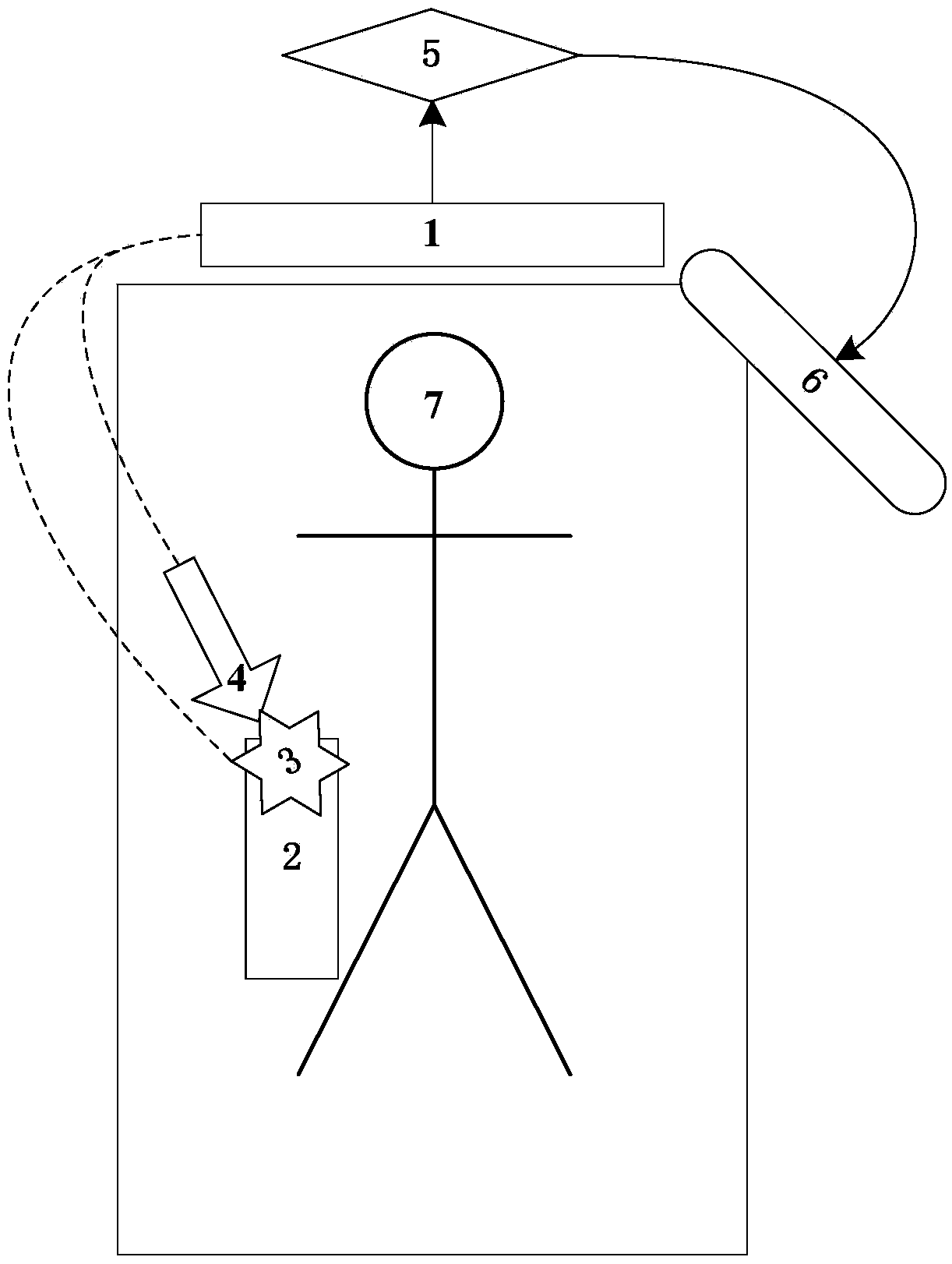
[0041] figure 1 It is a working schematic diagram of a specific embodiment of the surgical instr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More