

Robust adaptive underactuated surface ship path tracking control method based on fuzzy unknown observer
A robust adaptive and path-tracking technology, applied in adaptive control, two-dimensional position/course control, electric speed/acceleration control, etc., can solve the problem of reducing the accuracy of the path-tracking control system and fast and accurate disturbance estimation issues such as non-fulfillment of compensation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0130] The present invention is not limited to this embodiment, and any equivalent ideas or changes within the technical scope disclosed in the present invention are listed in the protection scope of the present invention.
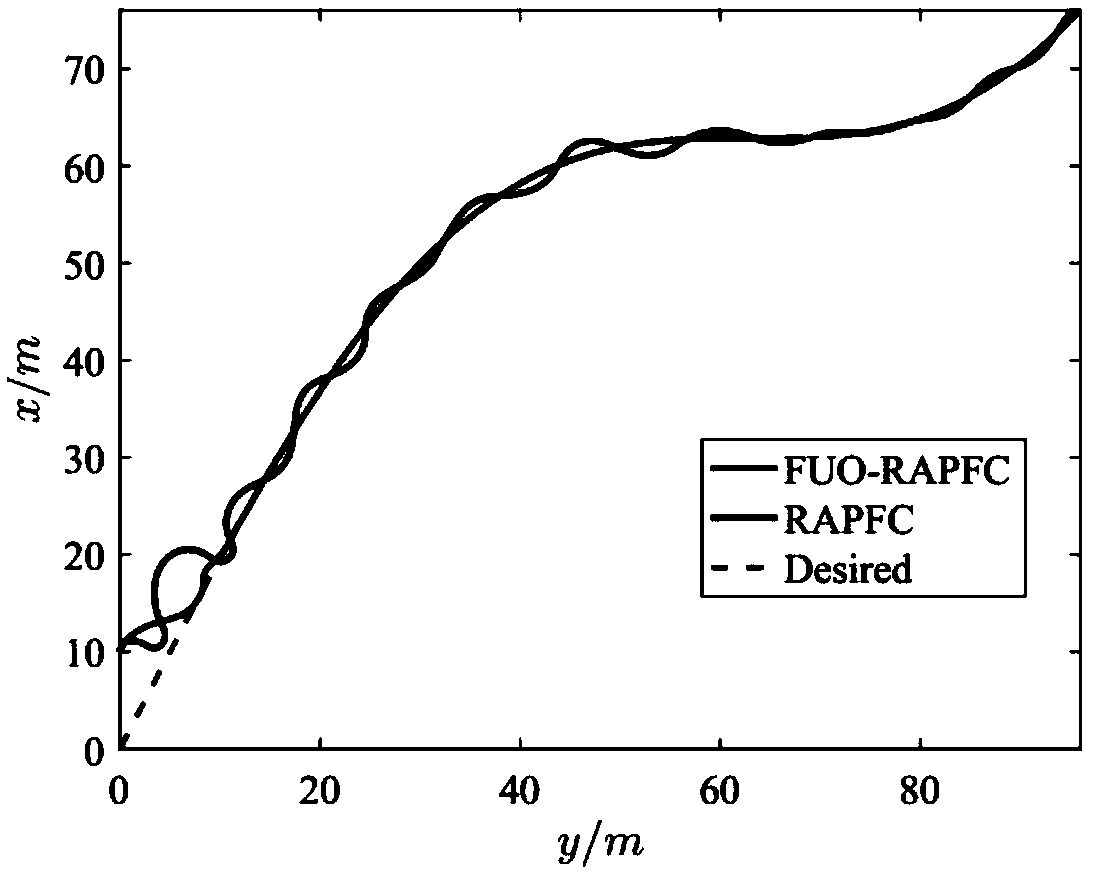
[0131] In order to illustrate the effectiveness and excellence of the method, a simulation is carried out on the Cybership I ship model, and the control method (abbreviation: FUO-RAPFC) proposed by the present invention and the algorithm framework without fuzzy unknown observer (abbreviation: RAPFC) are used to carry out The comparison is to illustrate the improvement of the performance of the path tracking control system by the fuzzy observer. The parameters of the ship model are:
[0132] m 11 =19kg,m 22 =35.2kg,m 33 =4.2kg,d 11 =4kg / s,d 22 =1kg / s,d 33 = 10 kg / s.
[0133] The complex parameter perturbation and unknown disturbance assumptions are as follows:
[0134] Δm 11 =0.1m 11 sin0.7t
[0135] Δm 22 =0.1m 22 cos0.7t
[0136] Δm 33 =0.1m ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More