

A second-order sliding mode control method for magnetically suspended switched reluctance motor
A technology of switched reluctance motor and second-order sliding mode, which is applied in the second-order sliding mode control of magnetic levitation switched reluctance motor and the field of high-performance control of magnetic levitation switched reluctance motor. problem, to achieve the effect of improving accuracy and improving robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and specific implementation examples.
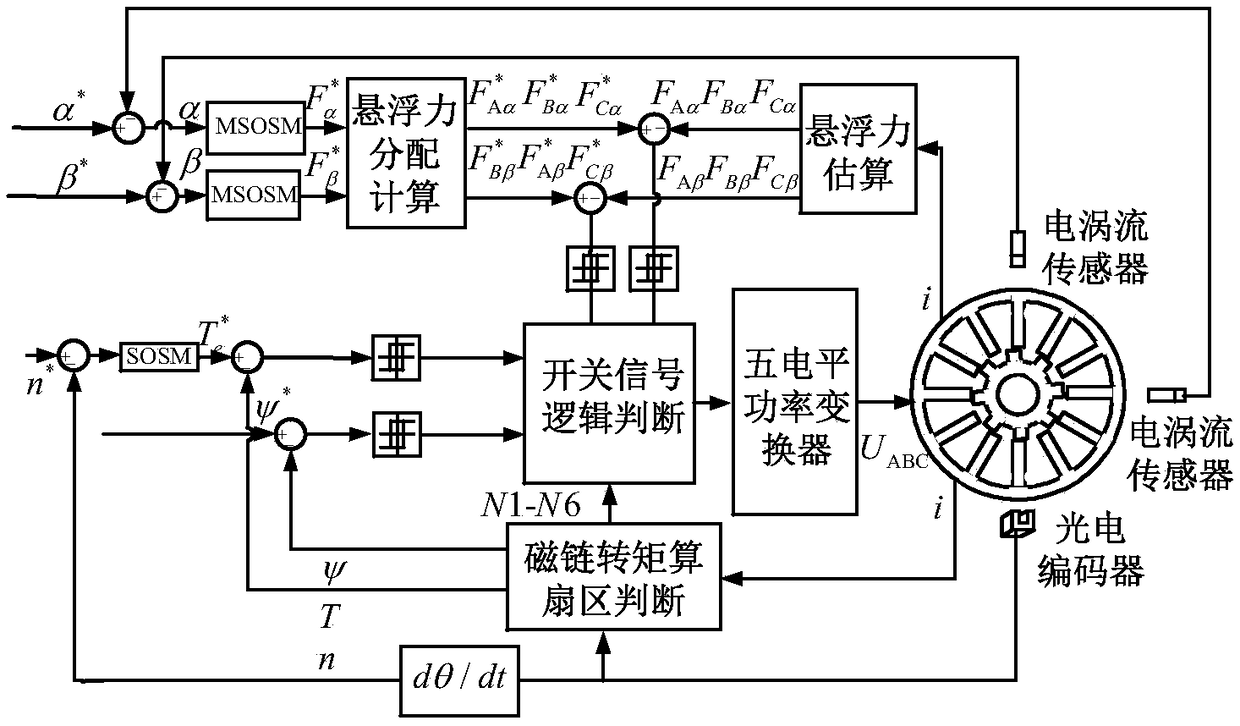
[0041] figure 1 It is a block diagram of the second-order sliding mode control system of the magnetic levitation switched reluctance motor. In the suspension subsystem, the actual position of the rotor and the given rotor position of the system constitute a closed-loop control, and the suspension force system in the α direction introduces the reference displacement α * , the displacement error e obtained by comparing the real displacement α obtained by the eddy current sensor α , converted into a reference levitation force by a modified second-order sliding mode displacement controller (MSOSM) The three-phase F * Aα , F * Bα , F * Cα , and with the actual output suspension force F Aα , F Bα , F Cα form a closed-loop control, F * Aα , F * Bα , F * Cα with F Aα , F Bα , F Cα The comparison difference judges the inp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More