

Hybrid flexible touch sensor
A kind of tactile sensor and hybrid technology, which is applied in the direction of instrumentation, measurement of the property and force of piezoelectric resistance materials, and measuring devices, etc. It can solve the problems of limiting the sensitivity of tactile sensors, the measurement range is not too large, and the working range of manipulators is limited. Achieve the effect of miniaturization and expansion of measuring range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
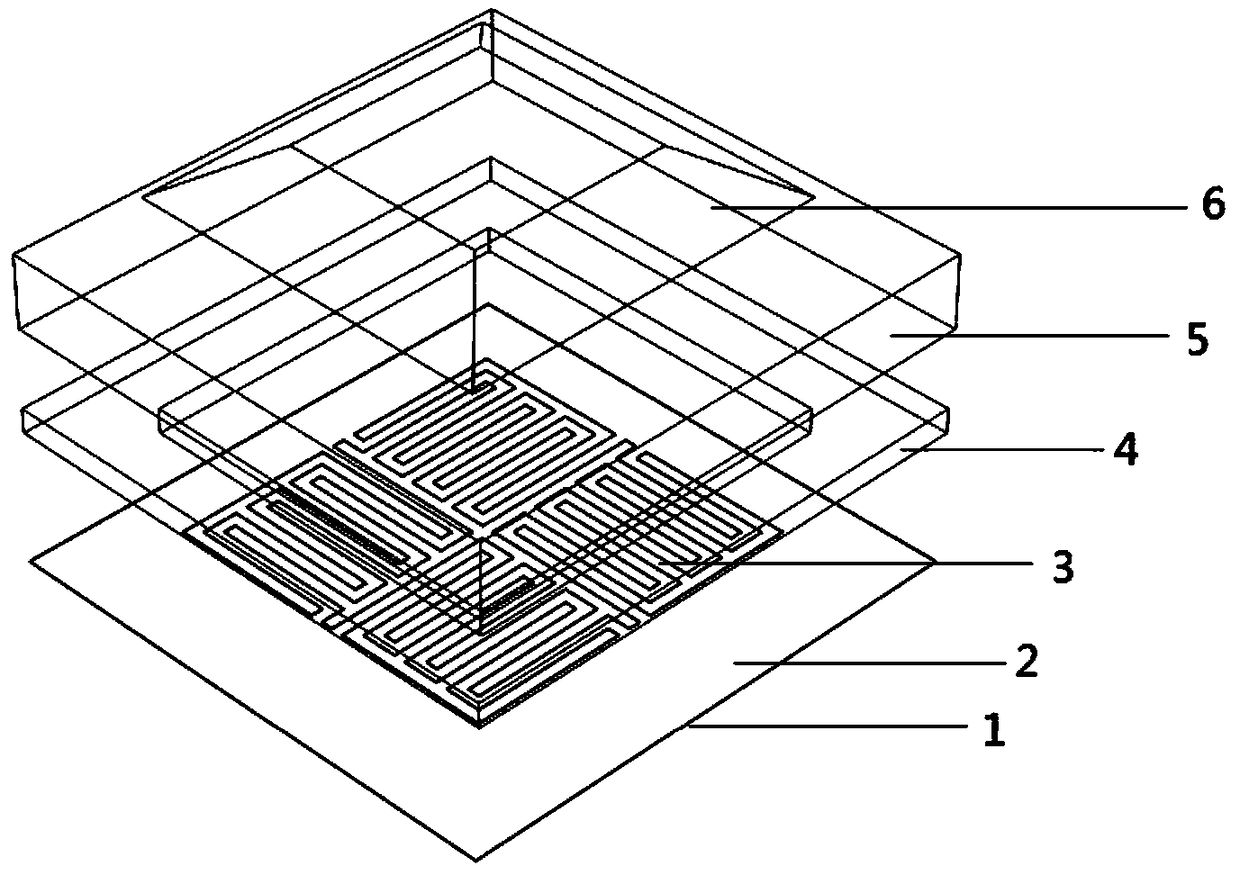
[0039] The structure of the hybrid flexible tactile sensor of the present invention is as follows: figure 1As shown, its composition includes a shielding layer 1, a flexible substrate 2, a planar interdigitated electrode 3, an insulating spacer layer 4, an elastic dielectric layer 5 and a contact layer 6;
[0040] Among them, from bottom to top are the shielding layer 1, the flexible substrate 2, the insulating spacer layer 4, the elastic dielectric layer 5 and the contact layer 6; the insulating spacer layer 4 is a frame structure, and the planar interdigitated electrodes 3 are bonded to the on the flexible substrate 2 and located in the inner frame of the insulating spacer layer 4 .
[0041] The flexible substrate 2 is located on the shielding layer 1, the planar interdigitated electrodes 3 are bonded to the flexible substrate 2, the insulating ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Side length | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More