

Storage medium, method and device for constructing navigation map
A navigation map and map construction technology, which is applied in the field of storage media for constructing navigation maps, can solve problems such as many useless points, discontinuous points, and inability to realize position and attitude estimation, and achieve the effect of compressing the number of point clouds
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0025] According to an embodiment of the present invention, an embodiment of a method for constructing a navigation map is also provided. It should be noted that the steps shown in the flowcharts of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and , although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
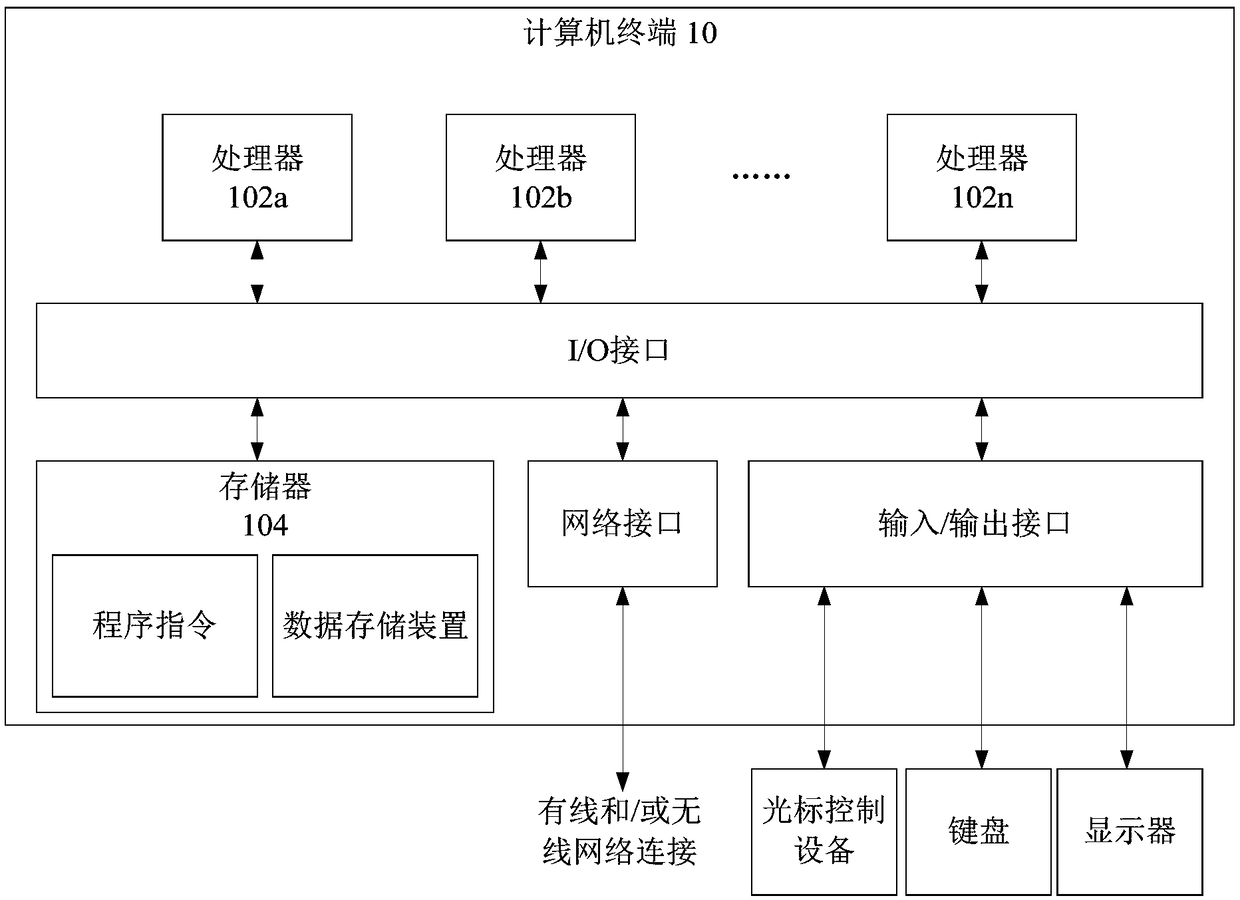
[0026] The method embodiment provided in Embodiment 1 of the present application may be executed in a mobile terminal, a computer terminal, or a similar computing device. figure 1 A hardware structure block diagram of a computer terminal (or mobile device) for realizing the method for constructing a navigation map is shown. Such as figure 1 As shown, the computer terminal 10 (or mobile device 10) may include one or more (shown by 102a, 102b, ..., 102n in the figure) processor 102 (the process...
Embodiment 2
[0089] image 3 is a schematic structural diagram of the device for constructing a navigation map according to Embodiment 2 of the present invention.
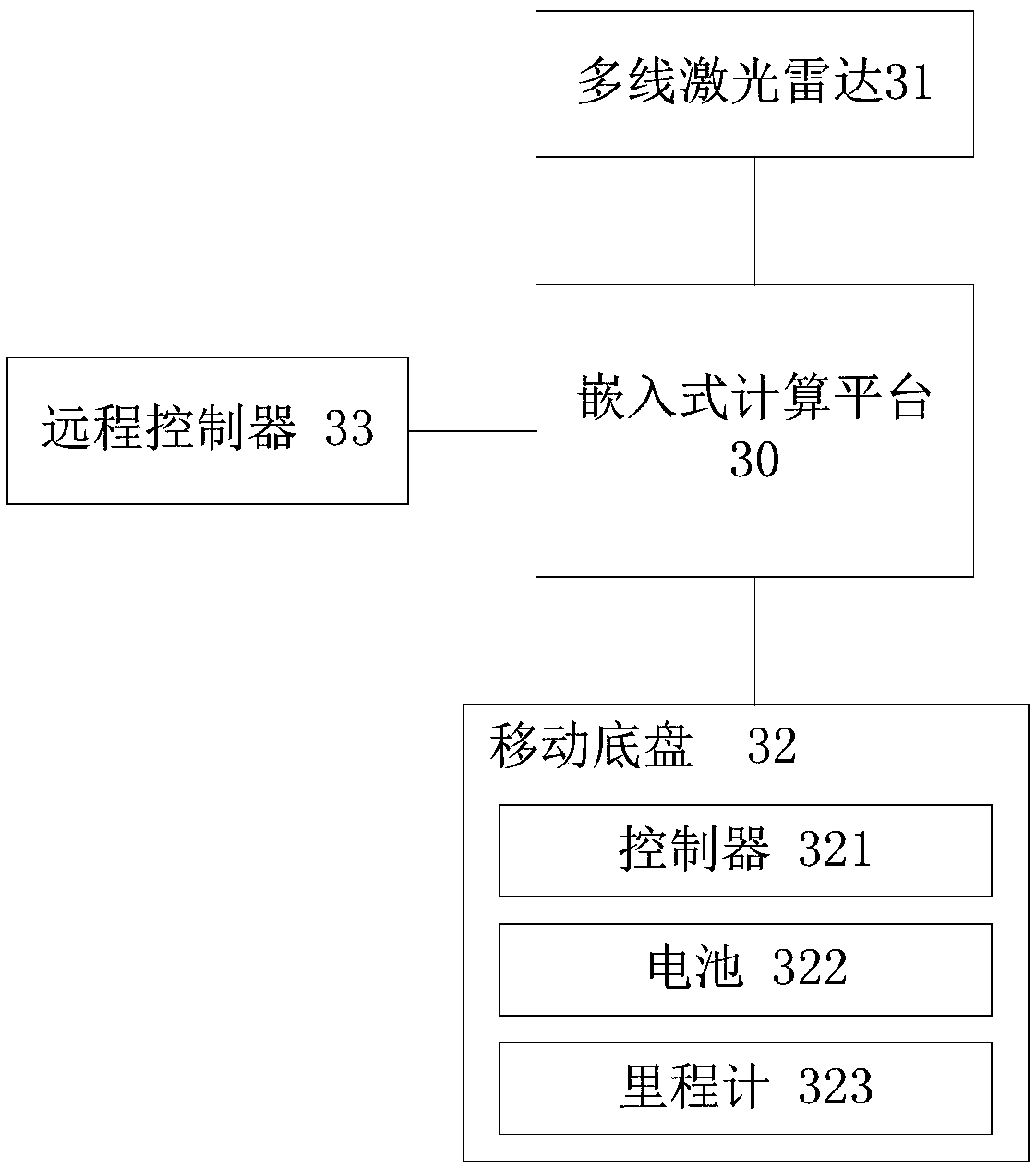
[0090] refer to image 3 As shown, the embodiment of the present disclosure provides a device for constructing a navigation map, which is characterized in that it includes: a multi-line laser radar 31 for acquiring 3D point cloud data of a destination point; a mobile chassis 32 for receiving a remote controller command, and control the movement of the multi-line laser radar according to the command; the remote controller 33 is used to remotely control the multi-line laser radar; and the embedded computing platform 30 is used to execute the method for constructing a navigation map as claimed in claim 1.
[0091] Wherein, the mobile chassis 32 is a four-wheel differential steering mobile robot chassis. In addition, the mobile chassis 32 has an external USB serial port communication interface, and has a built-in wheel odometer an...
Embodiment 3
[0123] image 3 shows a schematic diagram of a device for constructing a navigation map according to this embodiment, and the device is also compatible with figure 2 The method shown corresponds to the reference image 3 As shown, the equipment includes:
[0124] processor 41; and
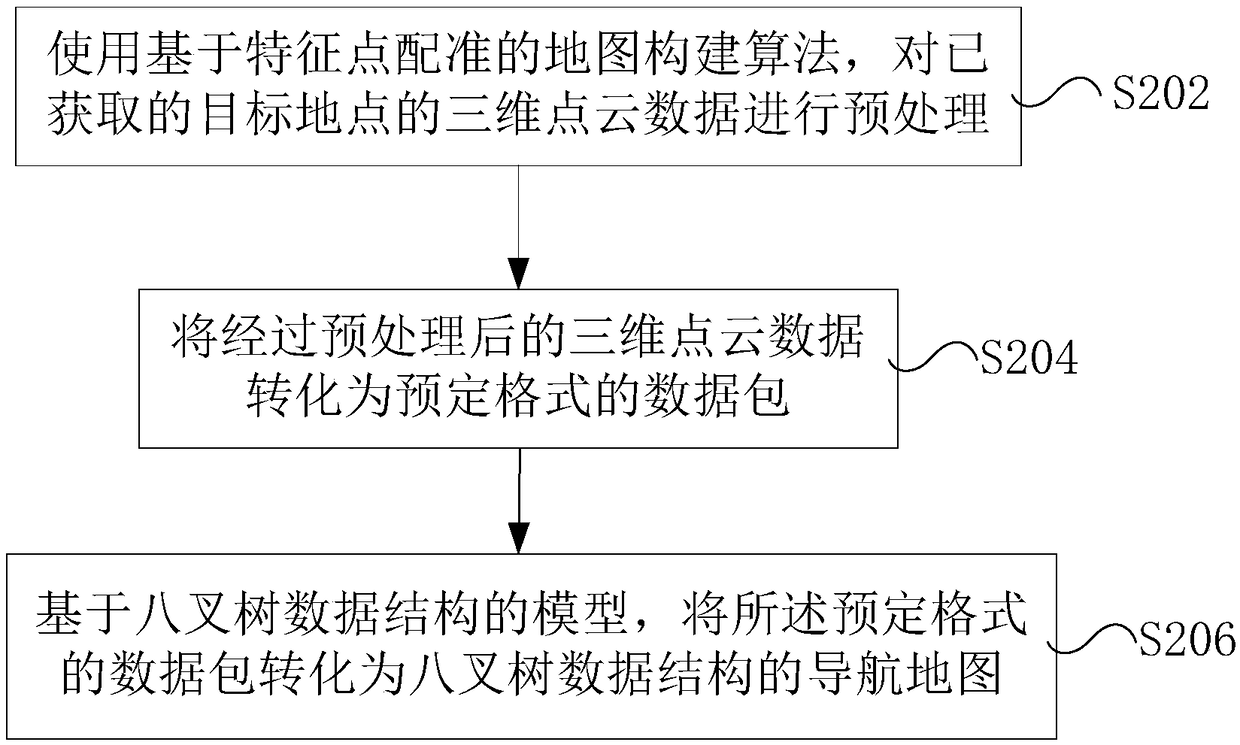
[0125] The memory 42 is connected to the processor 41, and is used to provide the processor 41 with instructions for processing the following processing steps: using a map construction algorithm based on feature point registration to preprocess the acquired three-dimensional point cloud data of the target location; The preprocessed 3D point cloud data is converted into point cloud data in a predetermined format; and the point cloud data in a predetermined format is converted into a navigation map of an octree data structure based on a model of an octree data structure.
[0126] Further, the predetermined format is a bag binary data format available in the PCL point cloud library.
[0127] Furt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More