

Mechanical arm movement rhythm control method based on CPG neural network
A neuron network and neuron technology, applied in the field of biomedical engineering, can solve the problems of low simulation degree, rigid control effect, slowness, etc., and achieve the effect of high computing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solutions of the present invention will be clearly and completely described and illustrated below in conjunction with the embodiments and the accompanying drawings, but this is not intended to limit the scope of protection of the present application.
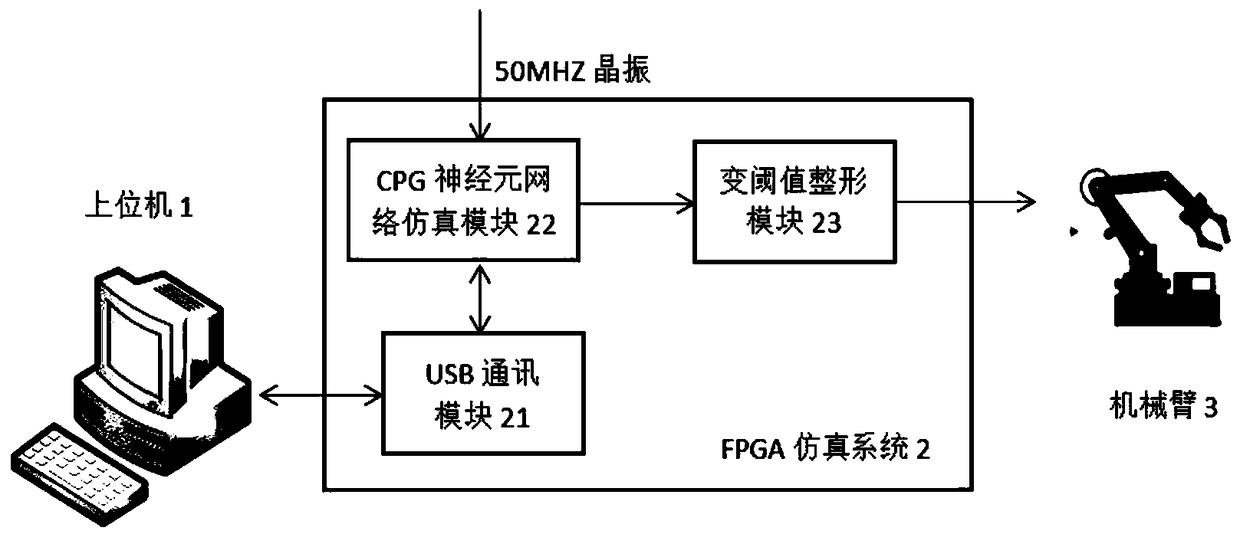
[0037] figure 1It is the general design block diagram of the system adopted by the present invention, and what the core FPGA chip adopts is Stratix III EP3SE260F1152C2N of Altera Company. Use the DSP Builder in MATLAB software to write the module-based CPG neuron network model, compile and synthesize it with Quartus II software, and download it to the chip to form the corresponding hardware circuit.
[0038] The motion rhythm control method of the manipulator based on the CPG neuron network is characterized in that the method is implemented with the help of the host computer and the FPGA development board, and the required relevant parameters are set in the host computer, and are transmitted to the FPGA deve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More