

Magnetic induced shrinkage or elongation touch sensor array for intelligent manipulator
A technology of tactile sensors and intelligent manipulators, applied in the field of sensor arrays, can solve the problems of difficulty in making sensor arrays and low test accuracy, and achieve the effects of uniform axial magnetic field, increased sensitivity, and improved measurement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0047] Example 1: The relationship between the applied force and the output voltage of a FeGa wire with a length of 16mm and a diameter of 0.8mm in the range of 0-2N. The main purpose of this embodiment is to study the input-output relationship, sensitivity and linearity of the sensor array.
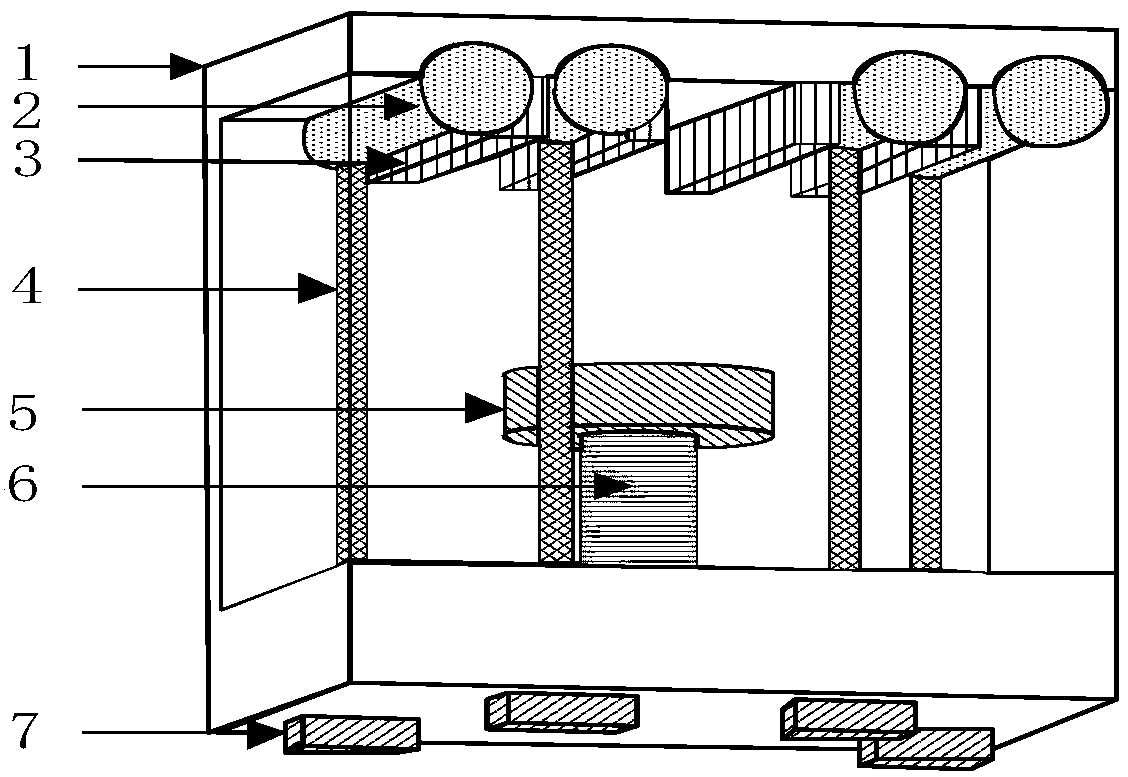
[0048] Experimental platform construction: according to figure 1 The sensor array structure shown is installed with various components, and the installed sensor array is fixed on the test bench. The vertical pressure applying device and the linear motor are respectively used to provide the known static force and dynamic force signals for the sensor. The output voltage signal of the Hall element is determined by The DH-8303 data acquisition card collects and transmits to the computer for display.
[0049] The software or protocols involved in the present invention are all known technologies.
[0050] Experimental process and results: Connect the output terminals of the sensor array to ...
Embodiment 2
[0051] Embodiment 2: A linear motor is used to apply a dynamic pressure, simulating the pressure when the hand grabs an object, and testing the dynamic output characteristics of the magnetostrictive tactile sensor array. The experimental platform is composed of signal generator, power amplifier, linear motor, DC regulated power supply, data acquisition card and PC computer. During the experiment, the output terminals of the sensor array were connected to the data acquisition card, and the acquisition card was connected to the computer, and the test data was read by the computer. A signal generator, a power amplifier and a linear motor are connected to provide sinusoidally varying forces with different frequencies and amplitudes. The DC regulated power supply is connected to the Hall element to provide a stable voltage for it.
[0052] The relationship between the output voltage and time of the sensor array obtained when the pressure amplitude is 1N and the frequency is 2Hz is...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
| Diameter | aaaaa | aaaaa |
| The inside diameter of | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More