

Laser line scanning 3D detection method and system based on scanning galvanometer and event camera
A technology of scanning galvanometer and detection method, which is applied in the direction of measuring device, optical device, instrument, etc., can solve the problems of high computing performance of processing chip, low resolution of depth image, high algorithm complexity, etc., and achieve fast data transmission speed, The effect of simple algorithm and fast response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
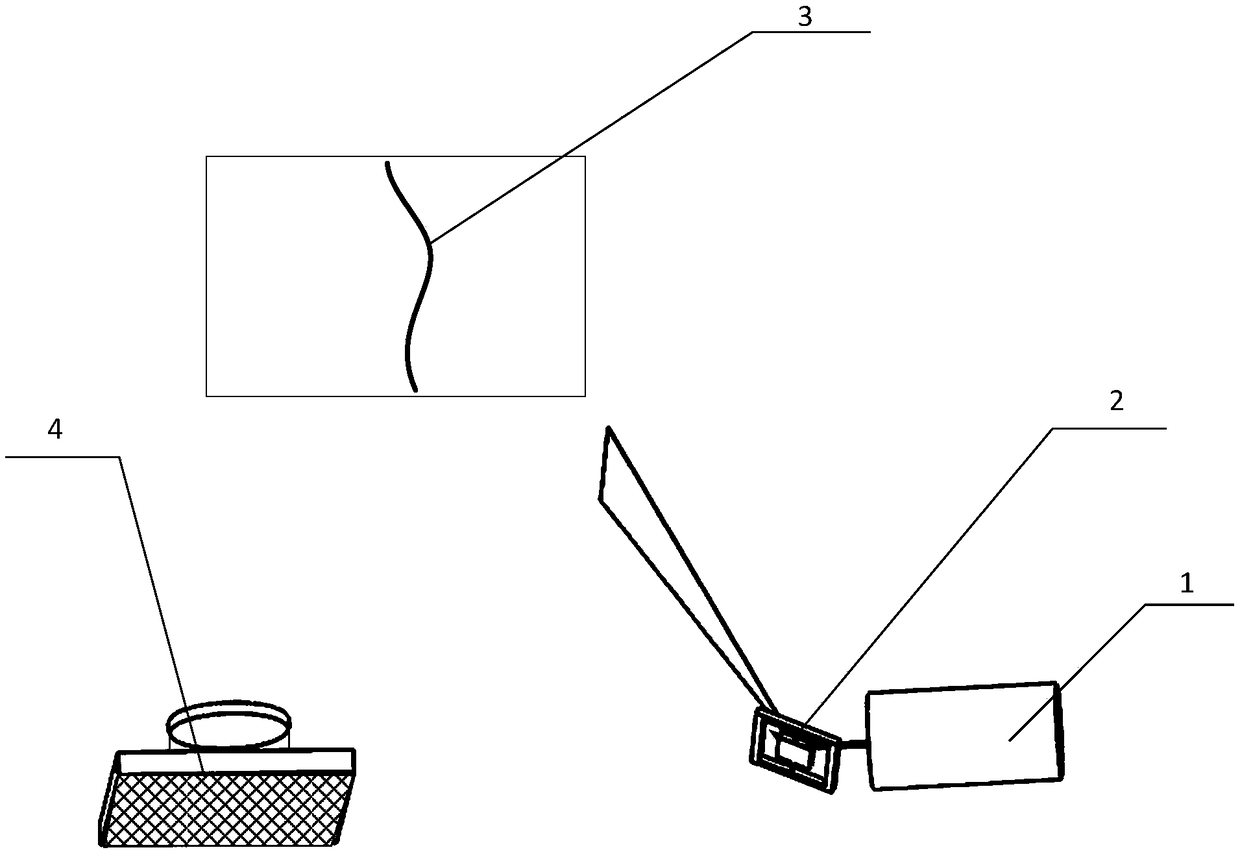
[0067] Such as figure 1 As shown, the laser line scanning 3D detection system based on the scanning galvanometer and the event camera in this embodiment mainly includes a line laser 1, a scanning galvanometer 2 and an event camera 4. The line laser 1 continues to work and is incident on the scanning galvanometer 2. The direction of the laser line is consistent with the direction of the rotation axis of the scanning galvanometer 2, and the scanning galvanometer 2 rotates around its rotation axis to reflect the line laser to the object 3 to be measured to realize laser line scanning; the event camera 4 collects the reflected light from the object 3 to be measured The laser line signal information realizes the 3D detection of the object 3 to be measured, and the detection method is as follows:
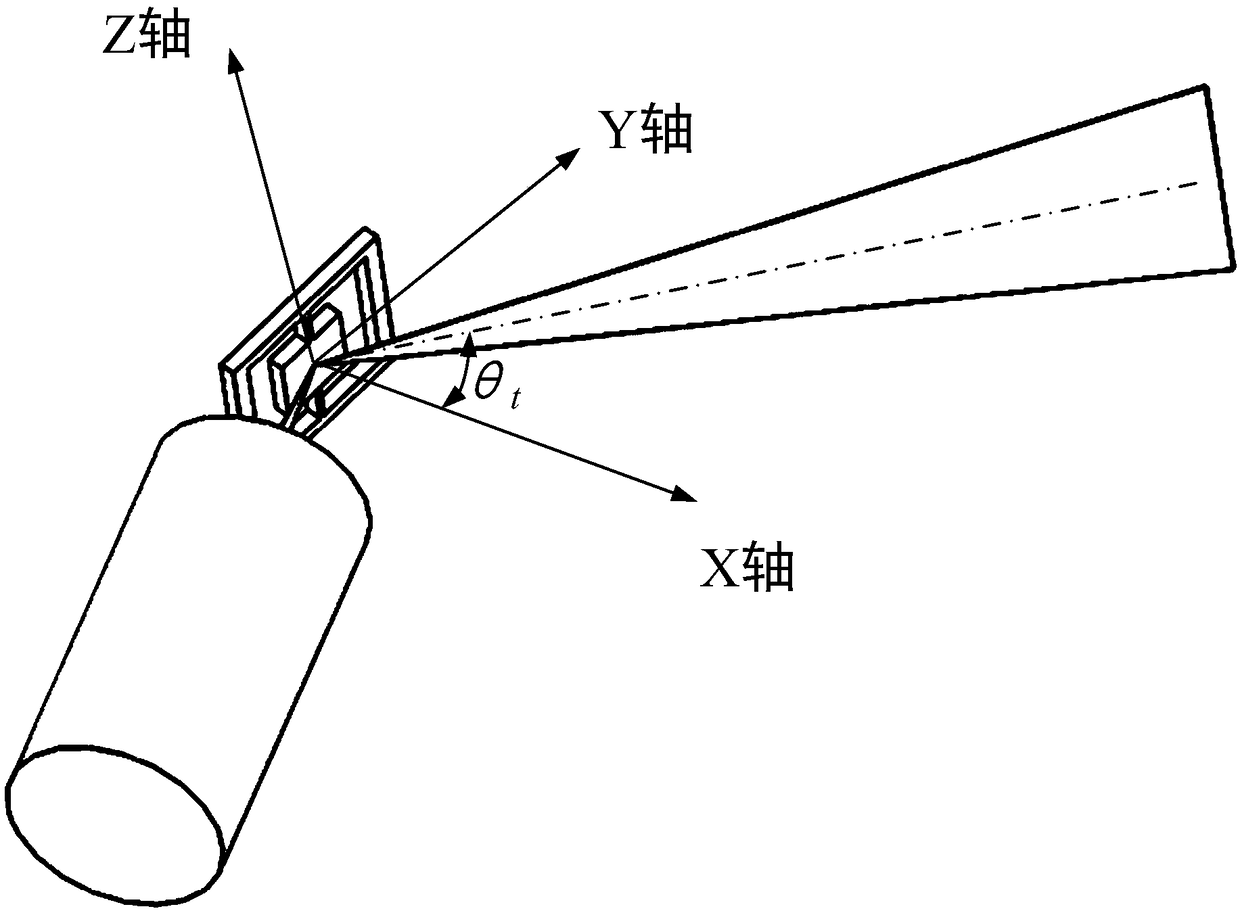
[0068] The motion of scanning galvanometer 2 is:
[0069] Among them, θ t is the rotation angle of the scanning galvanometer at time t, A is the amplitude of the rotation angle of the...
Embodiment 2
[0086] The resonant scanning galvanometer has high reliability, requires a small driving force, and has a large rotation angle, and is often used in the laser scanning process. Although the response rate of the event camera is extremely fast, it is limited after all. If the scanning frequency of the scanning galvanometer is too high, the accuracy may be reduced, such as Figure 4 , t n and t n+1 are two time periods that the event camera can continuously distinguish, and the scanned areas are respectively i n and i n+1 , if multiple rows of pixels respond at the same time in each time period, that is, at time t n and t n+1 Equivalent to fringe scans, no longer laser line scans, event cameras can no longer accurately detect t n and t n+1 The details of the fringe area scanned by the scanning galvanometer during the time period.
[0087] This embodiment proposes a method to solve the problem of low 3D detection accuracy caused by the above reasons: control the output of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More