

Navigation method, device, apparatus, and storage medium based on ground texture image
A technology of texture image and navigation method, which is applied in the field of robotics and can solve problems such as low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
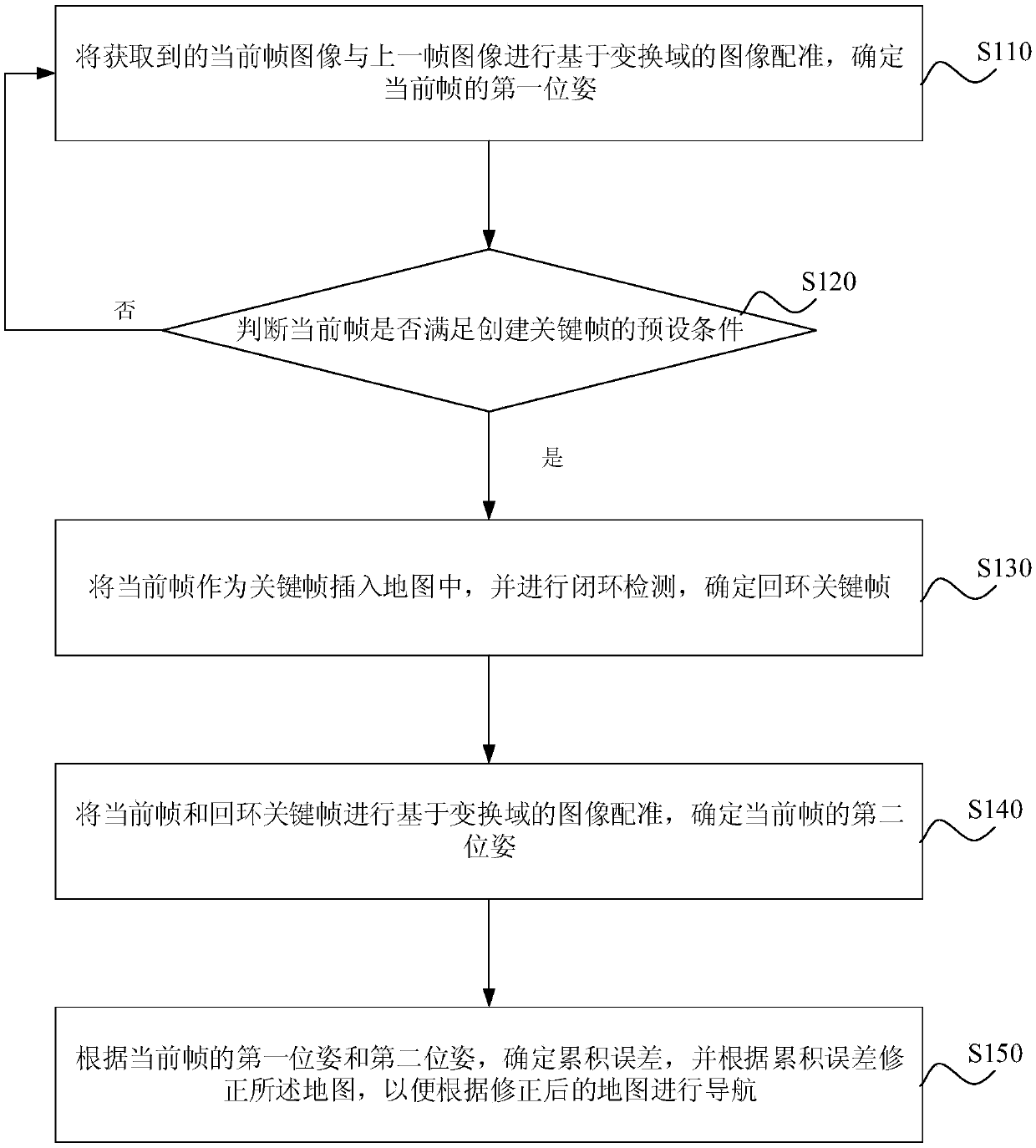
[0034] figure 2 It is a flow chart of the navigation method based on the ground texture image provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where the robot navigates based on SLAM (Simultaneous Localization And Mapping, real-time positioning and map construction). Texture image navigation device to implement, and can be integrated in electronic equipment, such as robots. Wherein, the navigation method based on the ground texture image mainly includes the following steps:
[0035] S110. Perform transform domain-based image registration on the acquired current frame image and the previous frame image, and determine a first pose of the current frame.
[0036] In the present invention, SLAM navigation based on ground texture features mainly includes tracking, composition, relocation and loop detection. Among them, the tracking link is real-time positioning, which mainly calculates the pose of the current frame image through th...
Embodiment 2
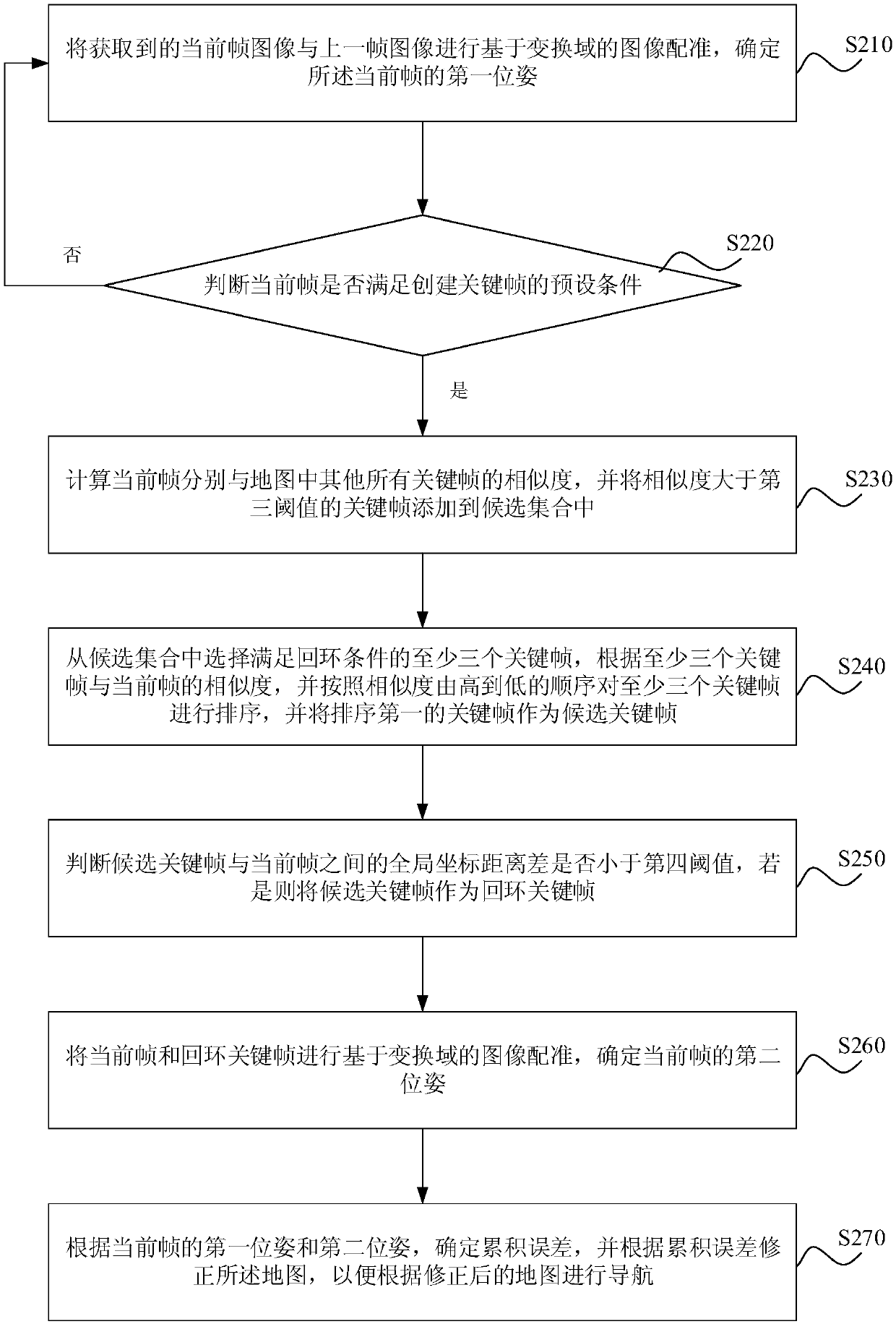
[0050] image 3 It is a schematic flow chart of the ground texture image-based navigation method provided by Embodiment 2 of the present invention. This embodiment is optimized on the basis of the foregoing embodiments, and the method includes:
[0051] S210. Perform transform domain-based image registration on the acquired current frame image and the previous frame image, and determine a first pose of the current frame.
[0052] S220. Determine whether the current frame satisfies the preset condition for creating a key frame, and if so, execute steps S230-S270. If not, continue to execute step S210.
[0053] S230. Calculate similarities between the current frame and all other keyframes in the map, and add keyframes with similarities greater than a third threshold to the candidate set.
[0054] In the present invention, when a new key frame is added to the map, loop closure detection is performed. First filter for keyframes that may be (forming) closed loops, where a close...
Embodiment 3
[0064] Figure 4 It is a schematic flowchart of the navigation method based on the ground texture image provided by the third embodiment of the present invention. This embodiment is optimized on the basis of the foregoing embodiments, and the method also includes:
[0065] S310. If the previous frame image is not a ground texture image, select a preset number of key frames to perform feature point matching with the current frame, and determine at least one candidate matching frame according to the matching results.
[0066] In the present invention, if there is an occlusion or a sudden movement, resulting in that the last frame image collected is not a ground texture image, that is, the feature is lost, global relocation is required. Exemplarily, by increasing the search range, a preset number of key frames can be selected to perform feature point matching with the current frame, and an alternative matching frame can be determined according to the matching result, that is, a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More