

Safety manipulator for rehabilitation training robot for upper limb
A technology of rehabilitation training and manipulators, applied in the field of manipulators, can solve problems such as incompleteness, insecurity of patients, and single structure and function, and achieve good coordination effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
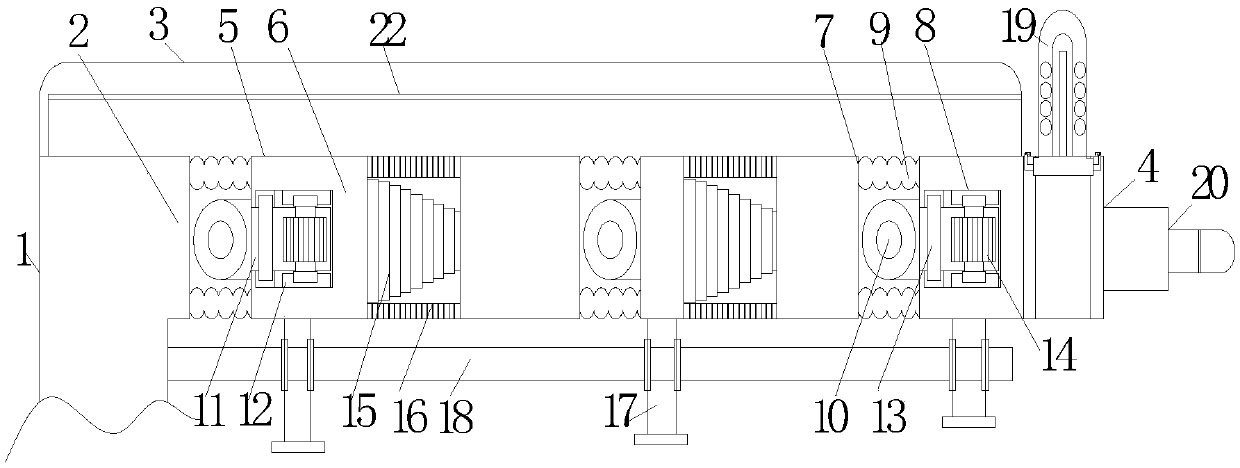
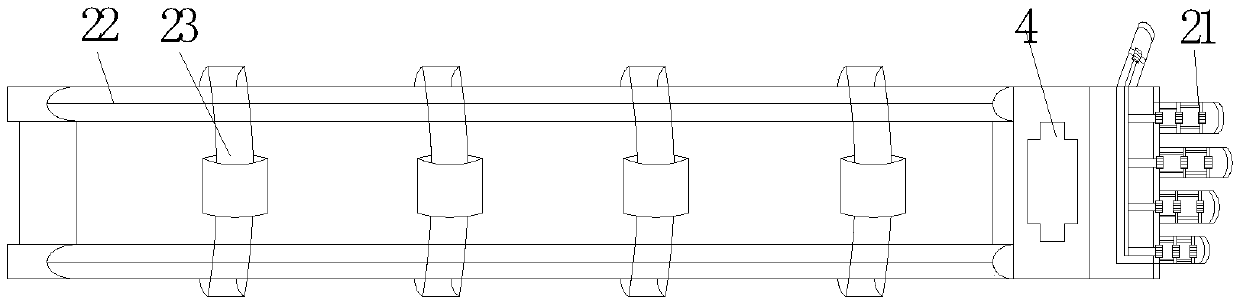
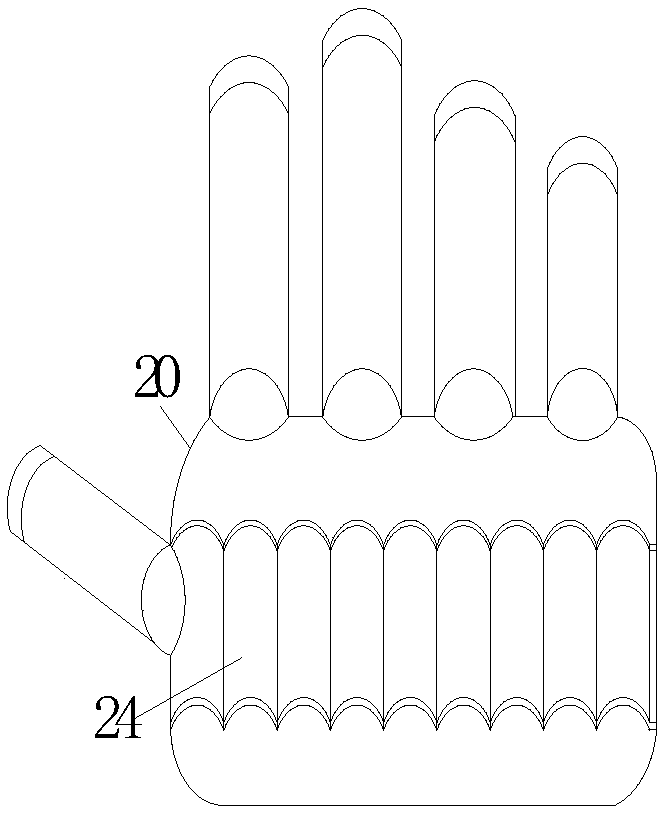
[0018] Such as Figure 1-3 The safety manipulator of a robot for upper limb rehabilitation training includes a manipulator body, a supporting device, a binding device, a gripping device, a support plate, a rotating device, a translation cavity, a retractable handle and a linkage hand. The manipulator body is composed of a supporting device, a binding device and a gripping device. The supporting device is provided with a supporting plate. They are all rotatably connected by a rotating device, and the front and rear two support plates are provided with translational chambers, the upper and lower ends of the rotating device are provided with elastic cotton layers, and the middle part of the rotating device is rotatably connected to the rotating shaft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More