

Method for automatically tracking unilateral sewing laser visual sense paths of composite material three-dimensional structural member
A composite material and three-dimensional structure technology, applied in sewing equipment, sewing machine components, program-controlled sewing machines, etc., to achieve the effects of single-sided sewing path tracking, rapid positioning, and improved calibration efficiency and calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof:
[0044] Such as Figure 1 to Figure 7 as shown,
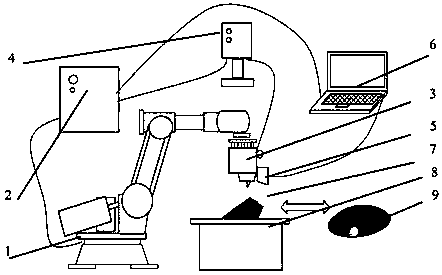
[0045] figure 1 The unilateral sewing robot and the three-stripe laser vision tracking system include an industrial robot 1 and its matching control cabinet 2, a composite material unilateral sewing head 3 is installed at the end of the mechanical arm, and its dedicated control system 4 is controlled by the robot through the Profibus bus technology Coordinated communication of the system; the three-stripe laser vision sensor 5 is installed at the front end of the composite material single-side sewing head 3 for image acquisition during the composite material sewing process, and the computer 6 performs the extraction of the spatial position of the sewing curve and the calculation of the sewing posture, And communicate with the robot electric control cabinet through industrial Ethernet; during calibration, the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More