

Six-degree-of-freedom platform positioning control method
A positioning control and degree of freedom technology, applied in the fields of mechanical automation and astronomy, can solve problems such as increasing the complexity of the control system, achieve the effects of improving control response speed, improving positioning accuracy, and simplifying the calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
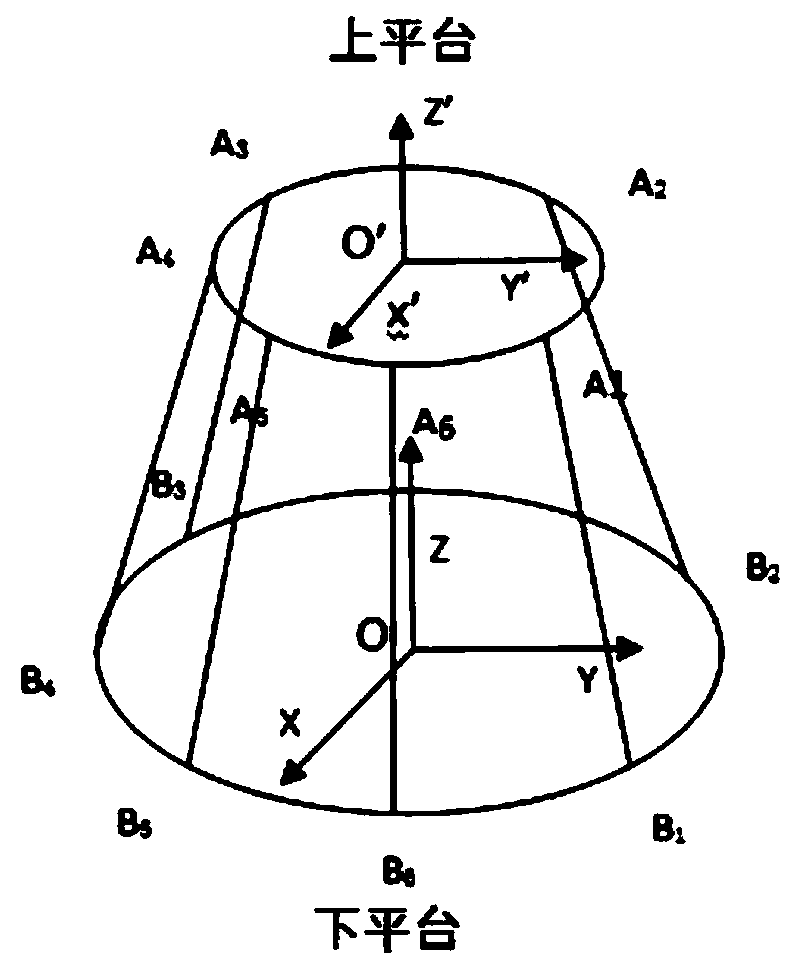
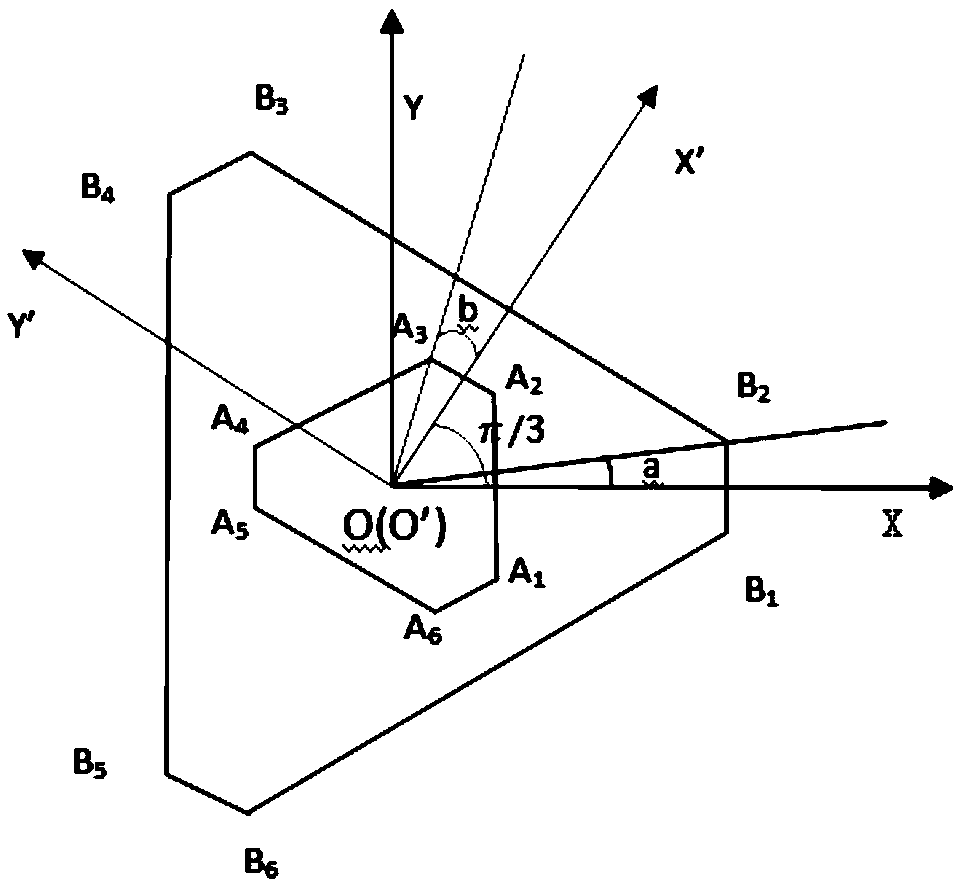
[0032] figure 1 It is a schematic diagram of the structure of the six-degree-of-freedom platform on which the present invention is based. The basic structure is divided into an upper platform (also known as a moving platform), a lower platform (also known as a fixed platform), a hinge (that is, the connection structure between the outrigger and the upper and lower platforms, not shown in the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More