

Redundancy design method of fault diagnosis of flight control system
A flight control system and fault diagnosis technology, applied in the direction of electrical testing/monitoring, etc., can solve the problems of not being able to be used for diagnosis, poor anti-interference ability, insensitive to slowly changing faults, etc., so as to reduce the probability of fault misjudgment, The effect of system reliability assurance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
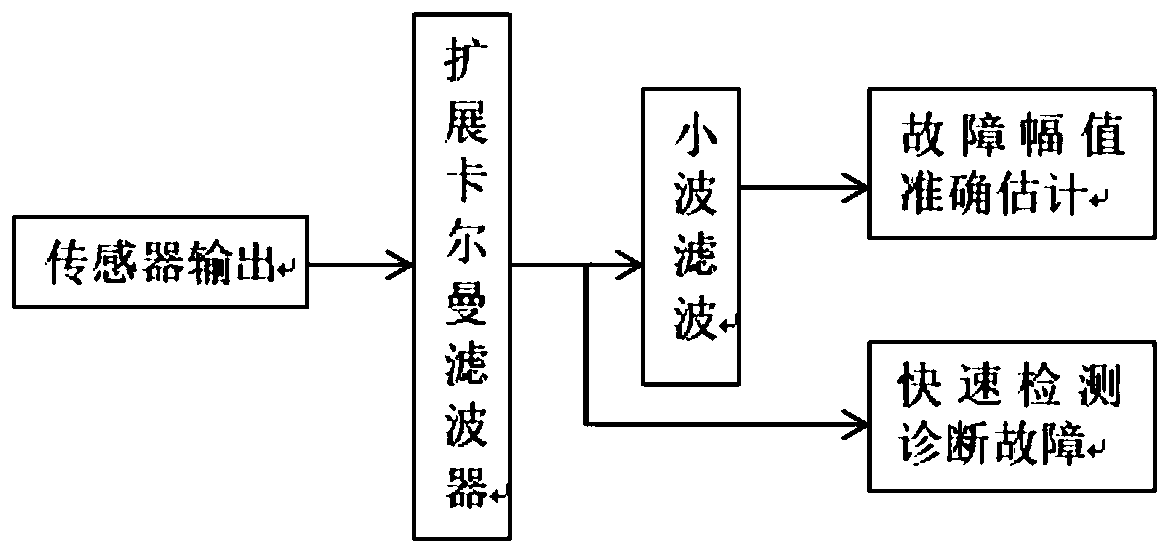
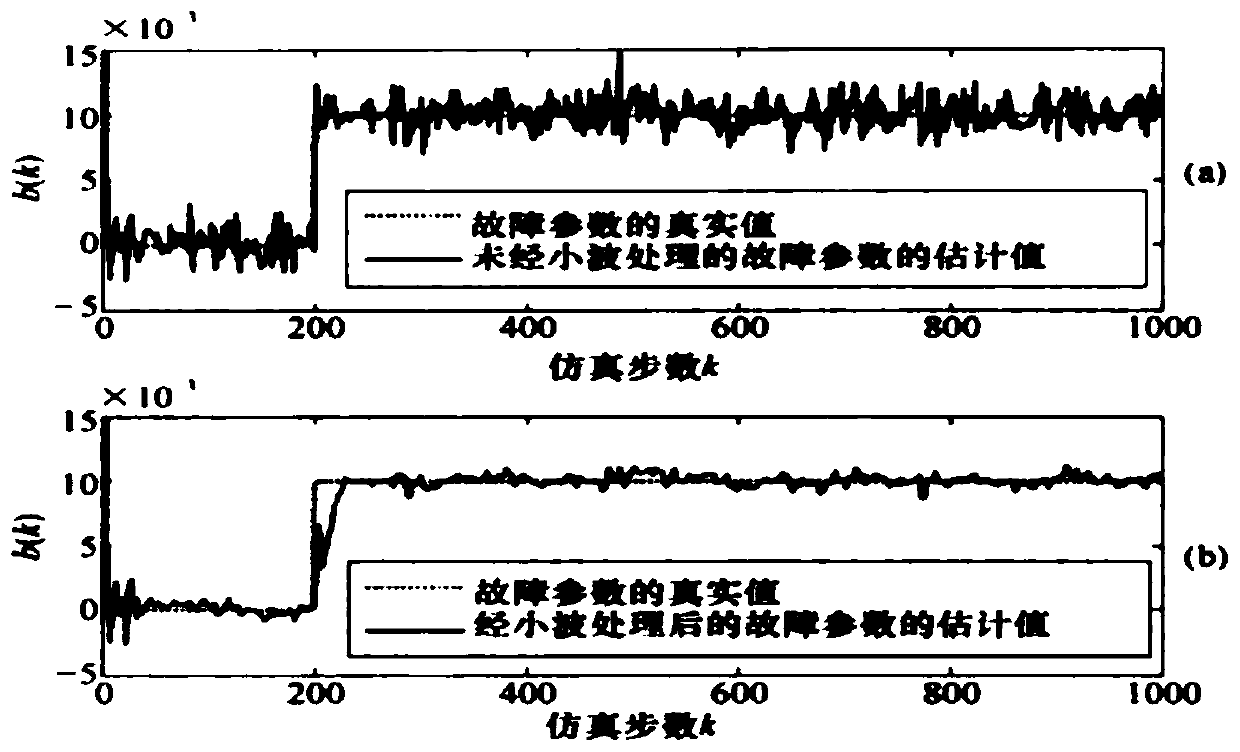
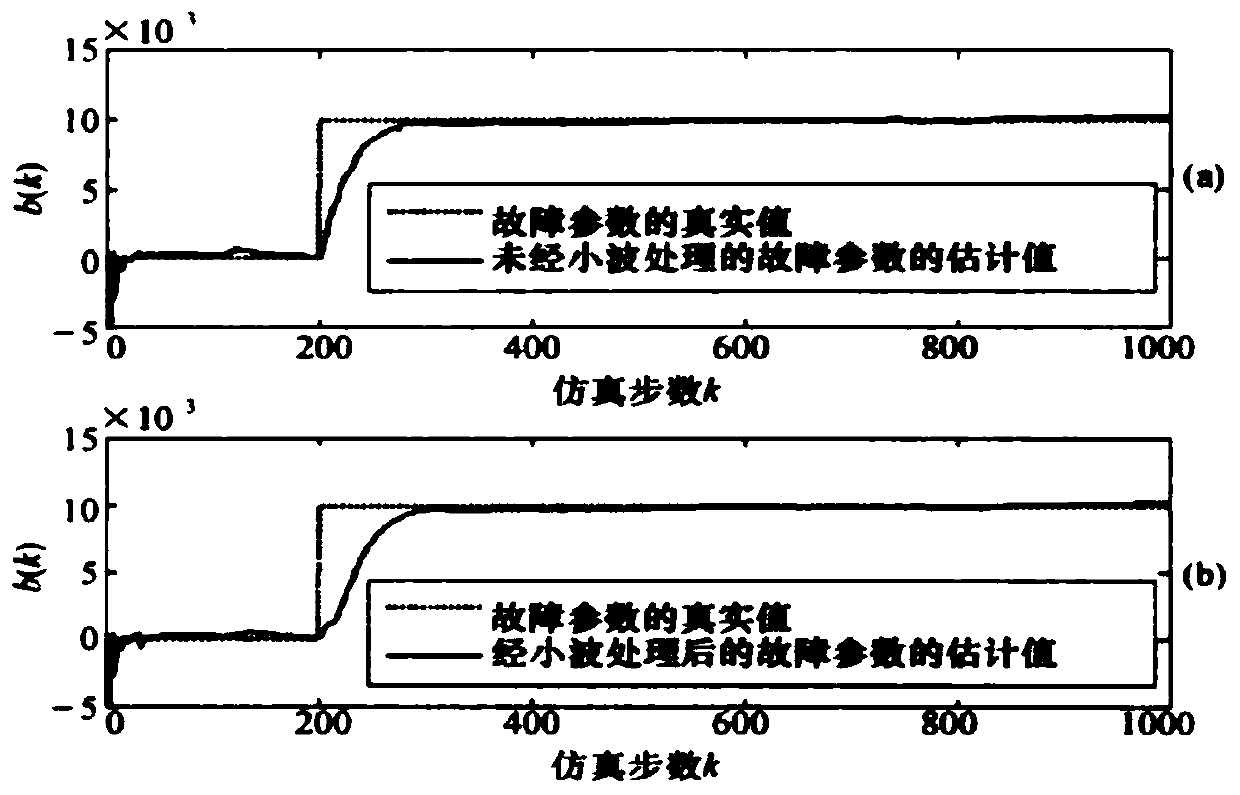
[0042] The redundant design method of the flight control system fault diagnosis provided by the present invention simplifies the system model by equivalently processing the sensor fault model, and takes the simplified model as the object to design the extended Kalman filter, which can improve the system status. Perform joint estimation with sensor fault parameters. In order to improve the stability of the filter and the estimation accuracy and tracking speed of sensor fault parameters, the noise variance in the filtering algorithm is appropriately increased, and the estimation results are processed by wavelet filtering to obtain a smoother According to the estimated value of the output value, it can quickly detect whether the sensor is malfunctioning or not.
[0043] The invention is based on the hardware redundancy of the flight control system. The system includes a power supply module, a CPU control unit and a bus module. Each module is independent of each other and does not int...
Embodiment 2
[0064] The flight control computer of the drone is equipped with three control units. The IDs of the three control units are respectively defined as CU-A, CU-B and CU-C. The three control units work at the same time after the flight control computer is powered on. The default CU-A is the master control unit, and the other two are slave control units. The order of priority of control rights is CU-A, CU-B and CU-C from high to low. The three control units simultaneously receive the input information transmitted by the interface unit through the internal bus of the system, such as the angle of attack sensor information. After completing the calculation and processing of navigation and control, the main control unit outputs corresponding control information to the interface unit. At the same time, the three control units also detect the fault status of each control unit in real time through self-inspection and mutual inspection. When the main control unit fails, the first slave con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More