

Visual inertia odometer based on hardware accelerator
A hardware accelerator and odometer technology, which is applied in the field of visual inertial odometer, can solve the problems of easy drift of VIO and mismatch of key frame data frequency, etc., and achieve the effect of reducing conversion calculation, reducing time complexity and fast detection speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
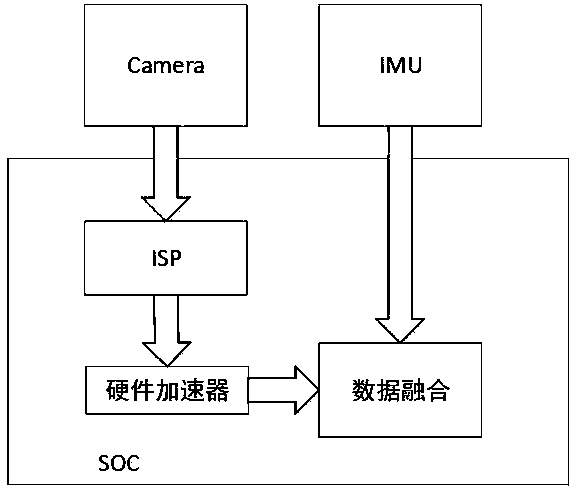
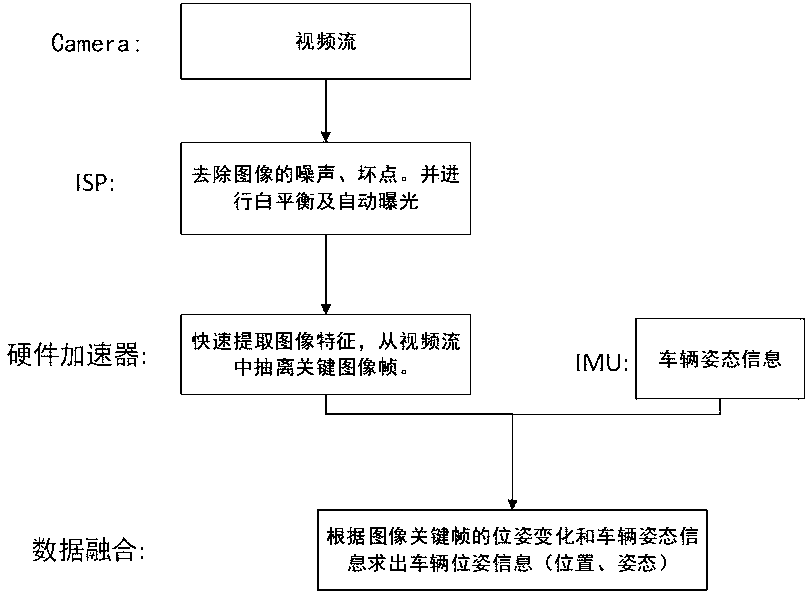
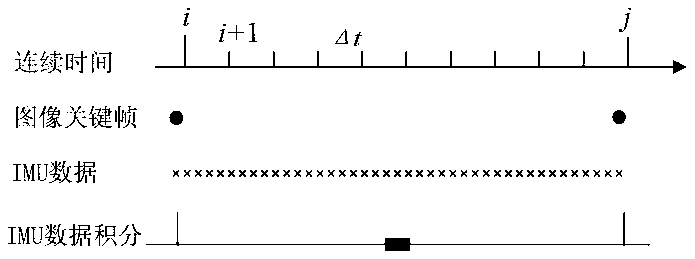
[0028] The visual-inertial odometry hardware platform based on the hardware accelerator of the present embodiment is as figure 1 As shown, the platform is mainly composed of car-grade SOC, Camera, and IMU. The image signal processor and hardware accelerator in the SOC process the image information output by the Camera, detect the feature points in the image, and find the adjacent key frames. The IMU can measure the acceleration and angular velocity information of the vehicle in real time. The current position information of the vehicle relative to the starting point is calculated by fusing the key frame data of the image and the body state information of the IMU. In order to solve the problem of data frequency mismatch between IMU, image frame, and key frame, this method pre-integrates the IMU information between key frames, and then combines the conventional visual SLAM method to improve the accuracy of VIO. Use hardware acceleration chips to extract image features in VIO, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More