

Three-turn-one-shift decoupling ankle joint rehabilitation robot
A rehabilitation robot and joint technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of inconvenient control, coupling inconvenient control, etc., and achieve the effect of convenient mechanism installation, saving production cost and time, and simple motion pairs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Exemplary embodiments, features, and performance aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
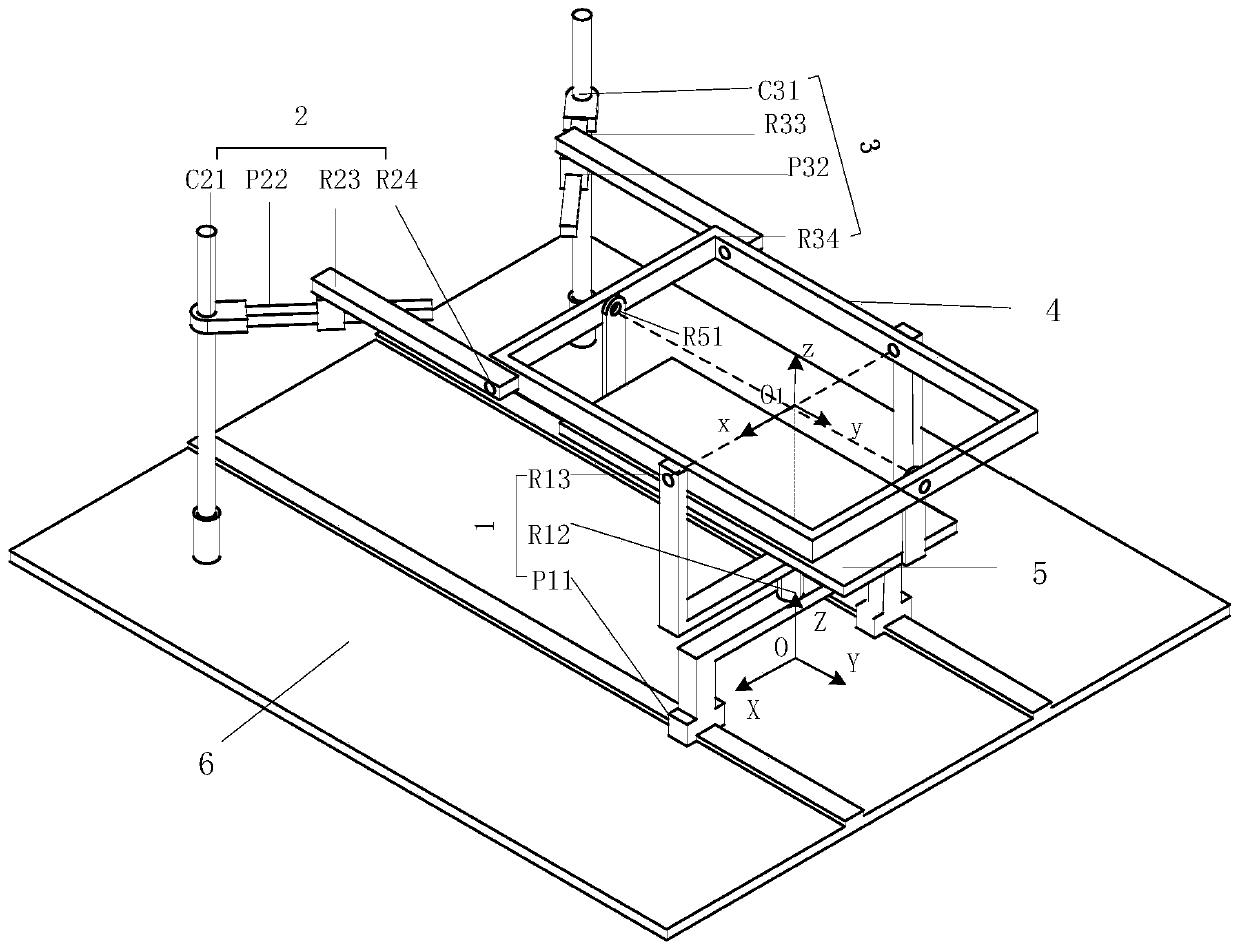
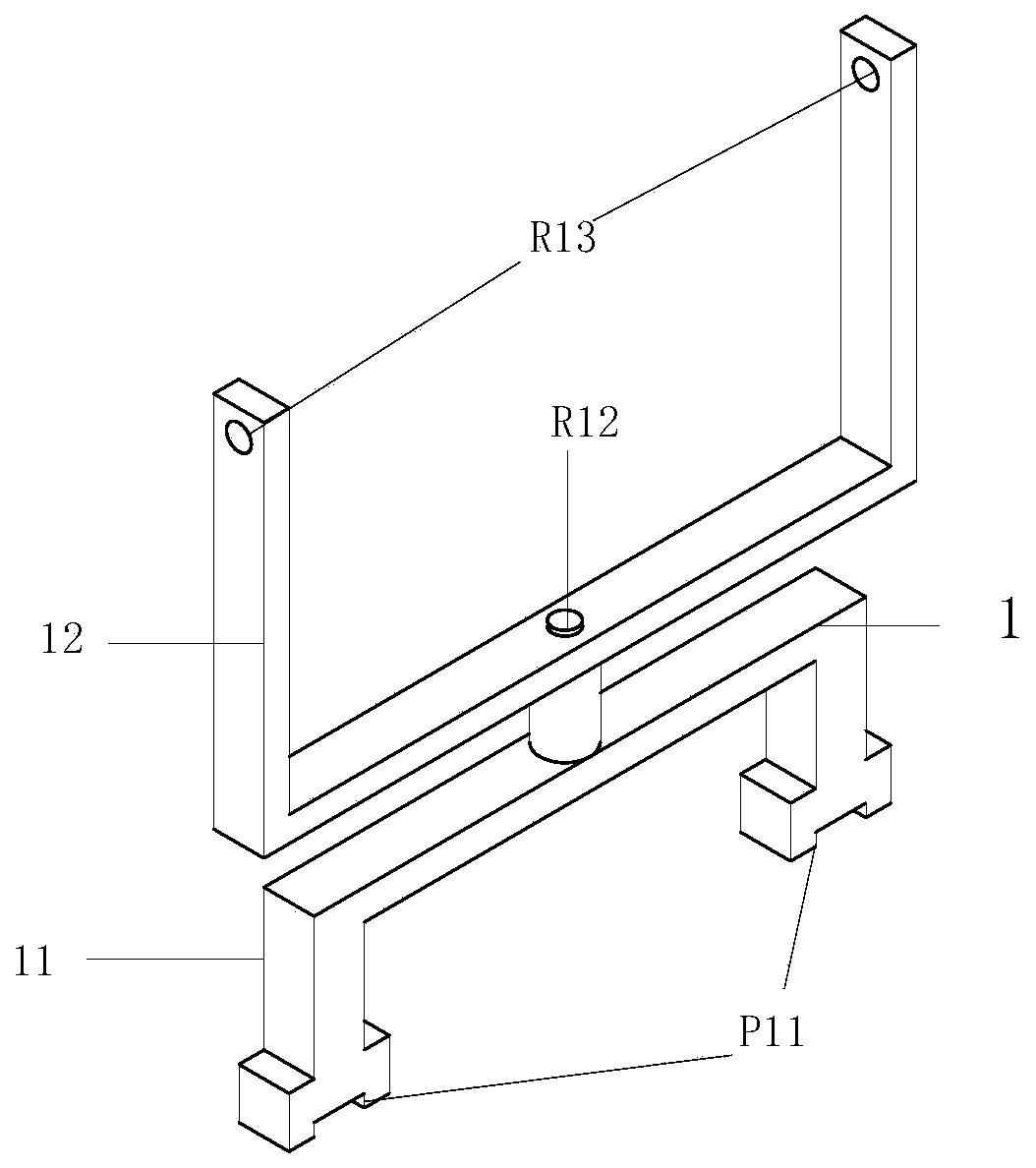
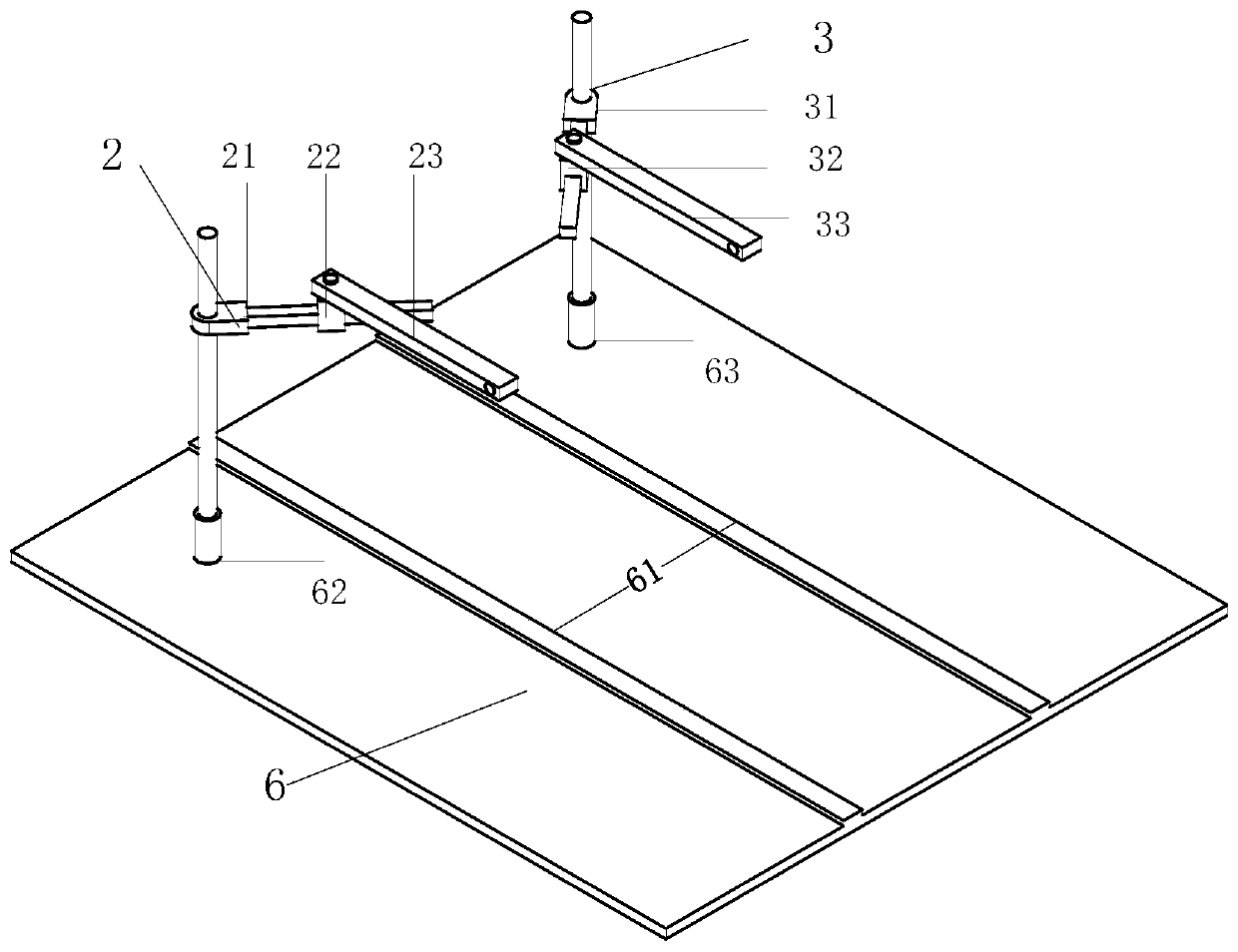
[0029] exist figure 1 In the schematic diagram of the overall structure of the robot shown, the fuselage is composed of a symmetrical hybrid mechanism, including a base 6, a moving platform 4, three branches 1, 2, 3 connecting the base 6 and the moving platform 4, and the moving platform 4 connected in series. The pedal 5 on the top; the parallel part of the hybrid mechanism is a 2-CPRR-PRR parallel mechanism, where C represents a cylindrical pair, P represents a moving pair, and R represents a rotating pair, and the cylindrical pair is a moving pair and a rotating pair The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More