

High-precision three-dimensional point cloud map construction method based on low-cost equipment
A 3D point cloud and map construction technology, applied in 3D modeling, image analysis, image data processing, etc., can solve the problems of high cost, difficult equipment maintenance, and large one-time investment, so as to achieve high cost and save map building cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
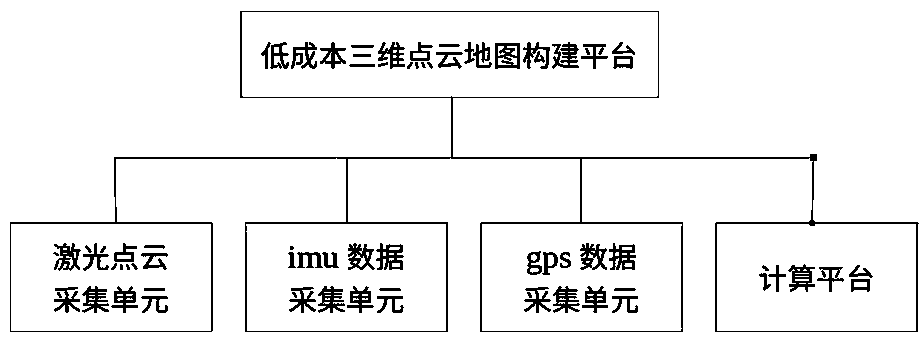
[0026] Such as figure 1 As shown, this embodiment provides a low-cost laser point cloud hardware combination solution for autonomous driving scene map construction, using low-cost satellite navigation signal receiving equipment (error level: meters), IMU (inertial measurement unit) and low-cost Lidar (16 lines, 32 lines). The hardware system is composed of laser point cloud acquisition unit, imu data acquisition unit, gps data acquisition unit and computing platform.
[0027] 1> The laser point cloud acquisition unit uses a 32-line laser radar to collect 3D point cloud data at a frequency of 10Hz. This unit provides accurate time-stamped point cloud data for the system, and is the most important part of the entire system.
[0028] 2>The imu data acquisition unit uses a thousand yuan low-cost imu, and the zero drift correction and temperature compensation after power-on are completed by the program. This unit provides high-frequency (50Hz) acceleration and angular velocity i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More