

VTK-based robot free-form surface workpiece polishing offline programming method
An offline programming, surface workpiece technology, applied in comprehensive factory control, instruments, simulators, etc., can solve the problems of relying on external import of grinding point data, unclear selection of grinding point spline curves, and poor human-computer interaction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0096] In order to verify the specific implementation of the present invention, an experiment was carried out using a grinding system constructed by Guangzhou CNC GSK_RB20 six-degree-of-freedom industrial robot and an abrasive belt machine. The holding device is installed at the end of the industrial robot, and the industrial robot drives the workpiece to be ground on the working surface of the grinding wheel of the abrasive belt machine. The unit of each coordinate data shown below is mm.
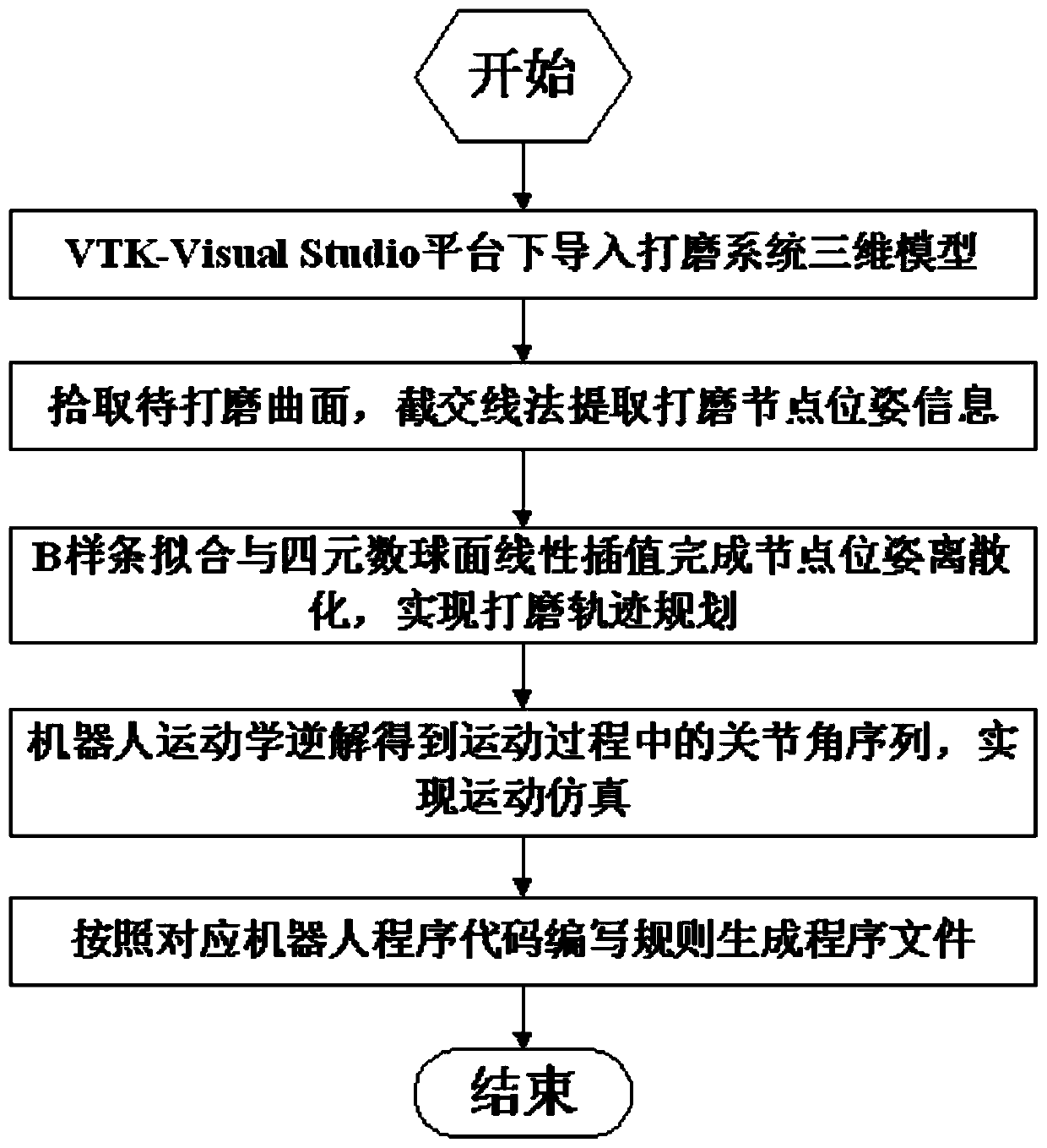
[0097] According to attached figure 1 Described implementation step flow chart, implementation steps are as follows:
[0098] Step (1): Import the 3D model of the grinding system and lay it out in the offline programming environment. In order to complete the layout, the robot, the belt machine and the workpiece are calibrated according to the actual pose relationship between the workpiece and the tool, and according to the calibration results:
[0099] The position and attitude relation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More